著者: ジェイコブ・チャオ @IOSG
<スパンリーフ="">ロボット パノラマ: 産業オートメーションからヒューマノイド インテリジェンスまで
<スパンリーフ="">従来のロボット産業チェーンは、下から上まで完全な階層化されたシステムを形成しており、<スパンテキスト="">コアコンポーネント – 中間制御システム – 完成した機械の製造 – アプリケーションの統合主要なリンクは 4 つあります。<スパンテキスト="">コアコンポーネント(コントローラー、サーボ、減速機、センサー、バッテリーなど) 機械全体の性能とコストの下限を決める技術的な障壁が最も高く、技術的な障壁が最も高くなります。<スパンテキスト="">制御システムこれはロボットの「脳と小脳」であり、意思決定、計画、動作制御を担当します。<スパンテキスト="">機械全体の製造サプライチェーン統合機能を反映します。<スパンテキスト="">システム統合とアプリケーション商業化の深さを決定することが、新たな価値の核になりつつあります。
<スパンリーフ="">アプリケーションのシナリオと形式に従って、グローバルロボットは「<スパンテキスト="">産業オートメーション → シナリオインテリジェンス → 一般インテリジェンス「経路の進化により、主に 5 つのタイプが形成されました。<スパンテキスト="">産業用ロボット、移動ロボット、サービスロボット、特殊ロボット、人型ロボット
<スパンリーフ="">#<スパンリーフ="">産業用ロボット<スパンテキスト="">(産業用ロボット)
<スパンリーフ="">現在、唯一の包括的で成熟したトラックであり、溶接、組み立て、スプレー、ハンドリングなどの製造プロセスで広く使用されています。業界は安定した粗利益率と明確なROIを備えた標準化されたサプライチェーンシステムを形成しています。サブカテゴリーの 1 つである協働ロボット (コボット) は、人間と機械のコラボレーションを重視しており、軽量で導入が簡単で、最も急速に成長しています。
<スパンリーフ=""><スパンテキスト="">代表企業:<スパンテキスト="">ABB、ファナック、安川電機、KUKA、ユニバーサルロボット、ジエカ、アオボ。
<スパンリーフ="">#<スパンリーフ="">移動ロボット<スパンテキスト="">(移動ロボット)
<スパンリーフ="">AGV(無人搬送車)やAMR(自律移動ロボット)をはじめ、物流倉庫、電子商取引流通、製造輸送などに大規模に導入されており、Bサイドで最も成熟したカテゴリーとなっています。
<スパンリーフ=""><スパンテキスト="">代表企業<スパンテキスト="">: Amazon Robotics、Geek+、Quicktron、Locus Robotics。
<スパンリーフ="">#<スパンリーフ="">サービスロボット<スパンテキスト="">(サービスロボット)
<スパンリーフ="">清掃、ケータリング、ホテル、教育などの業界をターゲットにしており、消費者側で最も急成長している分野です。掃除用品が家電のロジックに参入し、医療や商業流通でも商品化が加速している。さらに、より汎用的な操作ロボットが多数登場しています (Dyna の双腕システムなど)。タスク固有の製品よりも柔軟性がありますが、ヒューマノイド ロボットほど多用途ではありません。
<スパンリーフ=""><スパンテキスト="">代表企業: Ecovacs、Roborock Technology、Pudu Technology、Qinglang Intelligence、iRobot、Dyna など
<スパンリーフ="">#<スパンリーフ="">特殊ロボット
<スパンリーフ="">主に医療、軍事産業、建設、海洋、航空宇宙などのシナリオに対応します。市場規模は限られているが、利益率は高く、障壁は強い。同社は主に政府や企業の注文に依存しており、垂直セグメンテーションの成長段階にあります。<スパンテキスト="">代表的なプロジェクトとしては、<スパンテキスト="">Intuitive Surgical、Boston Dynamics、ANYbotics、NASA Valkyrie など。
<スパンリーフ="">#<スパンリーフ="">人型ロボット<スパンテキスト="">(人型ロボット)
<スパンリーフ="">将来の「ユニバーサルな労働力プラットフォーム」と考えられています。
<スパンリーフ=""><スパンテキスト="">代表企業:<スパンテキスト="">Tesla (Optimus)、Figure AI (Figure 01)、Sanctuary AI (Phoenix)、Agility Robotics (Digit)、Apptronik (Apollo)、1X Robotics、Neura Robotics、Unitree、UBTECH、Zhiyuan Robot など
<スパンリーフ="">人型ロボットは今最も注目を集めている最先端の方向性です。その核となる価値は、ヒューマノイド構造を既存の社会空間に適応させることにあり、「普遍的な労働プラットフォーム」につながる重要な形式とみなされています。究極の効率を追求する産業用ロボットとは異なり、人型ロボットは、<スパンテキスト="">一般的な適応性とタスクの転送性、環境を変えることなく工場、家庭、公共スペースに侵入できます。
<スパンリーフ="">現在、ほとんどの人型ロボットは未だに<スパンテキスト="">技術実証ステージ、主に動的バランス、歩行、操作能力を検証します。すでにいくつかのプロジェクトが進行中ですが、<スパンテキスト="">高度に管理された小規模な導入 (Figure × BMW、Agility Digit など) が工場シナリオで開始されており、2026 年からさらに多くのメーカー (1X など) が早期流通に参入すると予想されていますが、これらはまだ<スパンテキスト="">「狭いシーン、シングルタスク」の限定適用、本当の意味での普遍的な労働力の実現ではなく。全体として、大規模な商業化にはまだ数年かかるだろう。主なボトルネックには、多自由度調整やリアルタイムの動的バランスなどの制御上の問題が含まれます。エネルギー消費とバッテリー寿命の問題は、バッテリーのエネルギー密度と運転効率によって制限されます。知覚と意思決定のリンクは不安定になりやすく、オープンな環境では一般化することが困難です。重大なデータギャップ(一般的な戦略トレーニングをサポートするのが困難)。身体を越えた移動はまだ克服されていません。また、ハードウェアのサプライ チェーンとコスト曲線 (特に中国以外) が依然として現実的なしきい値を構成しており、大規模かつ低コストの導入を達成することがさらに困難になっています。
<スパンリーフ="">将来の商業化の道筋は、短期と短期の 3 つの段階を経ると予想されます。<スパンテキスト="">サービスとしてのデモ主にパイロットプロジェクトと補助金に依存しています。中期的には、<スパンテキスト="">Robotics-as-a-Service (RaaS)、タスクとスキルのエコロジーを構築します。長期的な<スパンテキスト="">ワークフォースクラウドと<スパンテキスト="">スマートなサブスクリプションサービスその中核として、私たちはハードウェア製造からソフトウェアおよびサービス ネットワークへの価値重視の移行を推進します。一般的に、人型ロボットはデモンストレーションから自己学習への重要な移行期にあります。将来、制御、コスト、アルゴリズムの三重の閾値を越えられるかどうかで、身体化されたインテリジェンスを真に実現できるかどうかが決まります。
<スパンリーフ="">AI×ロボット:身体化知能時代の幕開け
<スパンリーフ="">従来の自動化は主に事前プログラミングとパイプライン制御 (センシング、計画、制御の DSOP アーキテクチャなど) に依存しており、構造化された環境でのみ確実に実行できます。現実の世界はより複雑で変化しやすく、新世代の身体化インテリジェンス (身体化 AI) は別のパラダイムに従います。つまり、大規模モデルと統合表現学習を通じて、ロボットはシナリオ全体で「理解、予測、行動」する能力を備えています。身体化された知性の強調<スパンテキスト="">身体(ハードウェア)+脳(モデル)+環境(インタラクション)ダイナミックカップリング、ロボットがキャリアであり、インテリジェンスがコアです。
<スパンリーフ="">生成AIが所属するのは、<スパンテキスト="">言語の世界における知性、記号と意味論を理解するのが得意です。身体化されたAIが属する<スパンテキスト="">現実世界の知性、知覚と行動をマスターします。 2 つはそれぞれ「脳」と「身体」に対応し、AI 進化の 2 つの平行した主線を表しています。知能レベルの観点から見ると、身体化知能は生成 AI よりも高度ですが、その成熟度はまだ大幅に遅れています。LLM は、インターネットの膨大なコーパスに依存して、「データ → コンピューティング能力 → 導入」という明確な閉ループを形成します。一方、ロボットの知能には<スパンテキスト="">第一の視点、マルチモーダル、データがアクションに強く結びついている——リモコンの軌跡、一人称視点の動画、空間マップ、操作シーケンス等を含む。<スパンテキスト="">天然には存在しない、実際のインタラクションまたは忠実度の高いシミュレーションを通じて生成する必要があるため、希少性が高く高価です。シミュレーションと合成データは役立ちますが、それでも実際のセンサーの動きの経験に代わることはできません。これが、Tesla や Figure などが独自の遠隔操作データ ファクトリーを構築する必要がある理由であり、また、サードパーティのデータ アノテーション ファクトリーが東南アジアに出現している理由でもあります。要するに:<スパンテキスト="">LLM はすぐに利用できるデータから学習しますが、ロボットは物理世界と対話してデータを「作成」する必要があります。今後 5 ~ 10 年で、この 2 つは、ビジョン – 言語 – アクション モデルと身体化エージェント アーキテクチャで深く統合されるでしょう。LLM は高レベルの認知と計画を担当し、ロボットは現実世界の実行を担当し、データとアクションの双方向の閉ループを形成し、AI を「言語知能」から現実の知能へと共同で推進します。<スパンテキスト="">一般情報 (AGI)。
<スパンリーフ="">身体化されたインテリジェンスのコア テクノロジー システムは、ボトムアップのインテリジェンス スタックとみなすことができます。<スパンテキスト="">VLA (知覚融合)、RL/IL/SSL (インテリジェント学習)、Sim2Real (現実転送)、ワールド モデル (認知モデリング)、およびマルチエージェント コラボレーションと記憶推論 (Swarm & Reasoning)。その中で、VLA と RL/IL/SSL は、具体化されたインテリジェンスの「エンジン」であり、その実装と商用化を決定します。 Sim2Real と World Model は、仮想トレーニングと現実世界の実行を結び付ける重要なテクノロジーです。マルチエージェントのコラボレーションと記憶推論は、より高いレベルのグループとメタ認知の進化を表します。

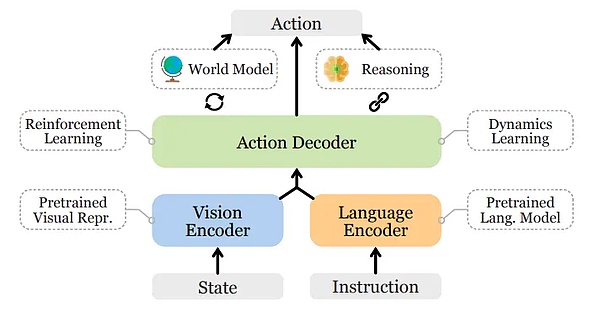
<スパンリーフ="">知覚理解:視覚・言語・行動モデル(視覚・言語・行動)
<スパンリーフ="">VLA モデルは次のことを統合します。<スパンテキスト="">ビジョン—言語—行動3 つのチャネルにより、ロボットは人間の言語から意図を理解し、それを特定の動作動作に変換できます。その実行プロセスには、セマンティック解析、ターゲット認識 (視覚入力からターゲット オブジェクトの位置を特定)、パス計画、およびアクションの実行が含まれており、それによって、身体化インテリジェンスの重要なブレークスルーの 1 つである「セマンティックの理解 – 世界の認識 – タスクの完了」という閉ループを実現します。現在の代表的なプロジェクトとしては、<スパンテキスト="">Google RT-X、Meta Ego-Exo、Figure Helix、それぞれ、クロスモーダル理解、没入型知覚、言語駆動制御などの最先端の方向性を示しています。
<スパンリーフ="">現在、VLA はまだ初期段階にあり、次の 4 つの主要なボトルネックに直面しています。
- <リ>
<スパンリーフ=""><スパンテキスト="">意味論的な曖昧さとタスクの一般化が弱い<スパンリーフ=""><スパンテキスト="">: モデルは曖昧で無制限の指示を理解することが困難です。
<リ>
<スパンリーフ=""><スパンテキスト="">視覚と運動の不安定な調整<スパンリーフ=""><スパンテキスト="">: パスの計画と実行において、認識エラーが増幅されます。
<リ>
<スパンリーフ=""><スパンテキスト="">多様なデータが不足しており、基準が一貫していない<スパンリーフ=""><スパンテキスト="">: 収集とラベル付けのコストが高く、大規模なデータ フライホイールを形成することが困難です。
<リ>
<スパンリーフ=""><スパンテキスト="">長期課題の時間軸と空間軸の課題<スパンリーフ=""><スパンテキスト="">: タスク スパンが長すぎると、計画と記憶の能力が不十分になります。一方、空間範囲が大きすぎると、モデルは「視野の外」のものについて推論する必要があります。現在の VLA には、安定したワールド モデルとクロススペース推論機能が不足しています。
<スパンリーフ="">これらの問題により、VLA のシナリオをまたがる一般化能力と大規模な実装プロセスが制限されます。
<スパンリーフ="">インテリジェント学習: 自己教師あり学習 (SSL)、模倣学習 (IL)、強化学習 (RL)
- <リ>
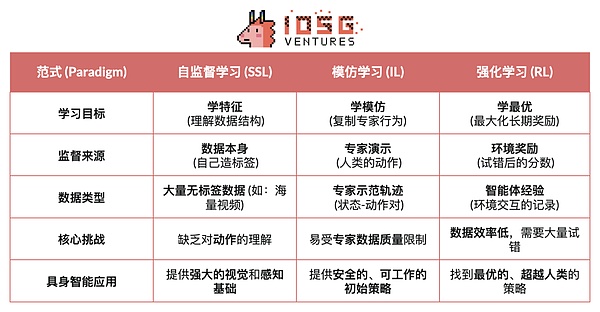
<スパンリーフ=""><スパンテキスト="">自己教師あり学習<スパンリーフ=""><スパンテキスト="">(自己教師あり学習): 感覚データから意味論的特徴を自動的に抽出し、ロボットが「世界を理解」できるようにします。機械に学習させるのと同じです<スパンテキスト="">観察と表現。
<リ>
<スパンリーフ=""><スパンテキスト="">模倣学習<スパンリーフ=""><スパンテキスト="">(模倣学習): 人間のデモンストレーションや専門家の例を模倣することで、基本的なスキルを迅速に習得します。機械に学習させるのと同じです<スパンテキスト="">人間のように行動する。
<リ>
<スパンリーフ=""><スパンテキスト="">強化学習<スパンリーフ=""><スパンテキスト="">(強化学習):「報酬-罰」メカニズムにより、ロボットは継続的な試行錯誤を通じて行動戦略を最適化します。機械に学習させるのと同じです<スパンテキスト="">試行錯誤しながら成長する。
<スパンリーフ=""><スパンテキスト="">身体化 AI では、自己教師あり学習 (SSL) の目的は、ロボットが感覚データを通じて状態変化と物理法則を予測できるようにし、それによって世界の因果構造を理解できるようにすることです。強化学習 (RL) は知能形成の中核エンジンであり、環境との相互作用や報酬信号に基づく試行錯誤の最適化を通じて、歩行、掴み、障害物回避などの複雑な動作を習得するようにロボットを駆動します。模倣学習 (IL) は、人間によるデモンストレーションを通じてこのプロセスを加速し、ロボットが事前行動を迅速に取得できるようにします。現在の主流の方向性は、この 3 つを組み合わせて階層的な学習フレームワークを構築することです。SSL は表現の基礎を提供し、IL は人間の事前情報を提供し、RL は効率と安定性のバランスを取るポリシーの最適化を推進します。これらは共に、理解から行動に至る身体化インテリジェンスのコアメカニズムを構成します。
<スパンリーフ="">現実の移行: Sim2Real – シミュレーションから現実への飛躍
<スパンリーフ=""><スパンテキスト="">シム2リアル(Simulation to Reality) は、ロボットが仮想環境でトレーニングを完了し、現実世界に移行できるようにすることです。次のような高忠実度のシミュレーション環境を使用します。<スパンテキスト="">NVIDIA アイザック シムと NVIDIAオムニバース、ディープマインド MuJoCo)大規模なインタラクティブ データを生成し、トレーニング コストとハードウェアの摩耗を大幅に削減します。その核心は「」を減らすことです。<スパンテキスト="">シミュレートされた現実のギャップ」の主な方法としては以下のようなものがあります。
- <リ>
<スパンリーフ=""><スパンテキスト="">ドメインのランダム化<スパンリーフ=""><スパンテキスト="">(ドメインのランダム化): シミュレーション中に照明、摩擦、ノイズ、その他のパラメーターをランダムに調整して、モデルの汎化能力を向上させます。
<リ>
<スパンリーフ=""><スパンテキスト="">物理的一貫性の校正<スパンリーフ=""><スパンテキスト="">: 実際のセンサー データを使用してシミュレーション エンジンを調整し、物理的な忠実度を高めます。
<リ>
<スパンリーフ=""><スパンテキスト="">適応型微調整<スパンリーフ=""><スパンテキスト="">(適応型微調整): 実際の環境での迅速な再トレーニングにより、安定した移行を実現します。
<スパンリーフ="">Sim2Real は、身体化されたインテリジェンスの実装における中心的なリンクであり、AI モデルが安全かつ低コストの仮想世界で「知覚 – 決定 – 制御」の閉ループを学習できるようにします。Sim2Real はシミュレーション トレーニングで成熟しました (NVIDIA Isaac Sim、MuJoC など)<スパンテキスト="">o) しかし、現実への移行は、現実ギャップ、高いコンピューティング能力とラベル付けコスト、オープン環境における不十分な一般化とセキュリティによって依然として制限されています。それにもかかわらず、Simulation-as-a-Service (SimaaS) は、身体化されたインテリジェンスの時代において、最も軽量でありながら最も戦略的に価値のあるインフラストラクチャになりつつあります。そのビジネス モデルには、プラットフォーム サブスクリプション (PaaS)、データ生成 (DaaS)、セキュリティ検証 (VaaS) が含まれます。
<スパンリーフ="">認知モデリング: ワールドモデル – ロボットの「内部世界」
<スパンリーフ=""><スパンテキスト="">ワールドモデル(世界モデル) は身体化された知能の「内脳」であり、ロボットが環境と行動の結果を内部的にシミュレートして、予測と推論を達成できるようにします。環境の動的な法則を学習することで予測可能な内部表現を構築し、エージェントが実行前に結果を「プレビュー」できるようにして、受動的な実行者から能動的な推論者に進化します。代表的なプロジェクトには、DeepMind Dreamer、Google Gemini + RT-2、Tesla FSD V12、NVIDIA WorldSim などが含まれます。一般的なテクノロジー パスは次のとおりです。
- <リ>
<スパンリーフ=""><スパンテキスト="">潜在変数モデリング<スパンリーフ=""><スパンテキスト="">(潜在ダイナミクスモデリング): 高次元の知覚を潜在状態空間に圧縮します。
<リ>
<スパンリーフ=""><スパンテキスト="">時系列予測想像力トレーニング<スパンリーフ=""><スパンテキスト="">(想像力に基づく計画): モデル内の仮想試行錯誤と経路予測。
<リ>
<スパンリーフ=""><スパンテキスト="">モデル駆動型強化学習<スパンリーフ=""><スパンテキスト="">(モデルベースの RL): 実際の環境をワールド モデルに置き換えて、トレーニング コストを削減します。
<スパンリーフ="">ワールド モデルは、身体化された知能の理論上の最前線にあり、ロボットが「反応型」知能から「予測型」知能に移行するための中核となる道です。しかし、複雑なモデリング、不安定な長期予測、統一基準の欠如などの課題により、依然として限界があります。
<スパンリーフ="">群知能と記憶推論: 個人の行動から共同認知まで
<スパンリーフ="">マルチエージェント システムと記憶と推論は、「個人の知能」から「グループの知能」および「認知的知能」への身体化知能の進化における 2 つの重要な方向性を表しています。両者が連携してインテリジェントシステムをサポート<スパンテキスト="">協同学習と<スパンテキスト="">長期的な適応<スパンテキスト="">能力。
<スパンリーフ="">#<スパンリーフ="">マルチエージェントコラボレーション (Swarm/Cooperative RL):
<スパンリーフ="">分散学習または協調強化学習を通じて、共有環境における複数のエージェントによる協調的な意思決定とタスクの割り当てを実現することを指します。この方向には、次のような強固な研究基盤があります。<スパンテキスト="">OpenAI Hide-and-Seek 実験は、マルチエージェントの自発的協力と戦略の創発、DeepMind QMIX および MADDPG アルゴリズムを実証します一元的なトレーニングと分散的な実行のための共同フレームワークを提供します。このタイプの方法は、倉庫ロボットのスケジューリング、検査、クラスター制御などのシナリオに適用され、検証されています。
<スパンリーフ="">#<スパンリーフ="">記憶と推論
<スパンリーフ="">エージェントに長期記憶、状況理解、因果推論の能力を与えることに重点を置くことは、タスク間の移行と自己計画を達成するための重要な方向性です。典型的な<スパンテキスト="">研究には、DeepMind Gato (統合された知覚-言語-制御マルチタスク エージェント) や DeepMind Dreamer シリーズ (世界モデルに基づく想像力豊かな計画)、および外部メモリを使用して外部メモリを使用する Voyager などのオープンな身体化エージェントが含まれます。自己進化による継続的な学習を実現します。これらのシステムは、ロボットが「過去を記憶し、未来を推測する」能力を持つための基礎を築きます。
<スパンリーフ="">世界の身体化インテリジェンス産業の展望: 協力と競争が共存

<スパンリーフ="">世界のロボット産業は「協力主導と競争深化」の時代にある。中国のサプライチェーンの効率性、米国のAI能力、日本の部品精度、欧州の工業標準が共同して世界のロボット産業の長期的なパターンを形作ることになる。
- <リ>
<スパンリーフ=""><スパンテキスト="">米国<スパンリーフ=""><スパンテキスト="">最先端の AI モデルとソフトウェア (DeepMind、OpenAI、NVIDIA) では時代の先を行きますが、その利点はロボット ハードウェアには及びません。中国メーカーは、イテレーション速度と実際のシーンのパフォーマンスにおいて、より多くの利点を持っています。米国はCHIPS法やインフレ抑制法(IRA)を通じて産業のリショアリングを推進してきた。
<リ>
<スパンリーフ=""><スパンテキスト="">中国<スパンリーフ=""><スパンテキスト="">大規模製造、垂直統合、政策主導の開発に依存し、部品、自動工場、人型ロボットの分野で主導的な優位性を形成し、優れたハードウェアとサプライチェーン能力を備えています。Yushu と UBTECH は量産を達成し、インテリジェントな意思決定レベルまで拡張しています。しかし、アルゴリズムとシミュレーショントレーニングの点では、中国と米国の間には依然として大きなギャップがあります。
<リ>
<スパンリーフ=""><スパンテキスト="">日本<スパンリーフ=""><スパンテキスト="">高精度部品やモーションコントロール技術を長期にわたって独占しており、産業体制は安定している。ただし、AI モデルの統合はまだ初期段階にあり、イノベーションのペースは比較的安定しています。
<リ>
<スパンリーフ=""><スパンテキスト="">韓国<スパンリーフ=""><スパンテキスト="">LGやNAVER Labsなどの企業が主導する消費者向けロボットの普及において傑出しており、成熟した強力なサービスロボットエコシステムを有している。
<リ>
<スパンリーフ=""><スパンテキスト="">ヨーロッパ<スパンリーフ=""><スパンテキスト="">エンジニアリング システムと安全基準は完成しており、1X Robotics などは引き続き研究開発レベルで活動していますが、一部の製造リンクは移転されており、イノベーションの焦点はコラボレーションと標準化に偏っています。
<スパンリーフ="">ロボット × AI × Web3: 物語的なビジョンと現実的なパス
<スパンリーフ="">2025 年、Web3 業界にはボットと AI が融合した新たな物語が生まれます。Web3 は分散型マシンエコノミーの基礎となるプロトコルとみなされていますが、その総合的な価値とさまざまなレベルでの実現可能性は依然として明確に区別されています。
- <リ>
<スパンリーフ=""><スパンテキスト="">ハードウェア製造およびサービス層<スパンリーフ=""><スパンテキスト="">資本集約的でデータの閉ループが弱い Web3 は、現時点ではサプライ チェーン ファイナンスや機器リースなどのエッジ リンクで補助的な役割しか果たせません。
<リ>
<スパンリーフ=""><スパンテキスト="">シミュレーションとソフトウェアのエコシステム層<スパンリーフ=""><スパンテキスト="">互換性は高いですね。 Simulation data and training tasks can be uploaded to the chain to confirm the rights.エージェントとスキル モジュールは、次の方法でも検証できます。<スパンテキスト="">NFTまたはエージェントトークン大文字化を実現します。
<リ>
<スパンリーフ=""><スパンテキスト="">プラットフォーム層<スパンリーフ=""><スパンテキスト="">、分散型労働およびコラボレーションネットワークが最大の可能性を示している – Web3 は、アイデンティティ、インセンティブ、ガバナンスの統合メカニズムを通じて信頼できる「機械労働市場」を徐々に構築し、将来の機械経済の制度的プロトタイプを築くことができます。

<スパンリーフ="">長期的な視点で見ると、<スパンテキスト="">コラボレーションとプラットフォーム層これは、Web3、ロボット、AI の統合における最も価値のある方向性です。ロボットが知覚、言語、学習能力を徐々に獲得するにつれて、自律的な意思決定、協力、経済的価値の創造が可能な知的個体へと進化しています。これらの「知的労働者」が経済システムに真に参加するには、依然として 4 つの境界を越える必要があります。<スパンテキスト="">アイデンティティ、信頼、インセンティブ、ガバナンスコアの閾値。
- <リ>
<スパンリーフ="">で<スパンテキスト="">アイデンティティ層、マシンには確認可能で追跡可能なデジタル ID が必要です。パスする<スパンテキスト="">マシンDIDを通じて、各ロボット、センサー、またはドローンは、チェーン上に固有の検証可能な「ID カード」を生成し、その所有権、行動記録、権限の範囲を結び付け、安全な対話と責任の定義を実現できます。
<リ>
<スパンリーフ="">で<スパンテキスト="">トラストレイヤー鍵となるのは、「機械労働」を検証可能、測定可能、測定可能にすることです<スパンテキスト="">価格設定。スマート コントラクト、オラクル、監査メカニズムを Proof of Physical Work (PoPW)、Trusted ExecutionEnvironment (TEE)、Zero-Knowledge Proof (ZKP) と組み合わせて利用することで、タスク実行プロセスの信頼性とトレーサビリティを確保し、マシンの動作を経験的なものにすることができます。経済会計上の価値。
<リ>
<スパンリーフ="">で<スパンテキスト="">インセンティブ層、Web3 パス<スパンテキスト="">トークンインセンティブシステム、アカウント抽象化、ステータスチャネルマシン間での自動決済とバリュー転送を実現します。ロボットは、マイクロペイメントを通じてコンピューティング能力のレンタルとデータ共有を完了し、誓約とペナルティのメカニズムを使用してタスクのパフォーマンスを保証できます。スマートコントラクトとオラクルの助けを借りて、手動スケジューリングを必要としない分散型の「マシンコラボレーション市場」を形成することもできます。
<リ>
<スパンリーフ="">で<スパンテキスト="">ガバナンス、マシンが長期的な自律性機能を備えている場合、Web3 は透過的でプログラム可能なガバナンス フレームワークを提供します。<スパンテキスト="">DAO を使用して、共同意思決定システムのパラメーターを管理し、マルチ署名とレピュテーション メカニズムでセキュリティと秩序を維持します。長期的には、これにより機械社会は「アルゴリズムガバナンス」の段階へと押し上げられることになる――人間が目標と境界を設定し、機械は契約を利用してインセンティブとバランスを維持することになる。
<スパンリーフ=""><スパンテキスト="">Web3とロボットの融合の究極のビジョン 実環境評価ネットワーク——多様で複雑な物理シナリオでモデルの機能を継続的にテストおよびベンチマークする分散ロボットで構成される「現実世界推論エンジン」。そして<スパンテキスト="">ロボット労働市場——ロボットは世界中で検証可能な現実のタスクを実行し、オンチェーン決済を通じて利益を獲得し、その価値をコンピューティング能力やハードウェアのアップグレードに再投資します。
<スパンリーフ="">実用的な観点から見ると、身体化されたインテリジェンスと Web3 の組み合わせはまだ初期の探索段階にあり、分散型マシン インテリジェンス経済は依然としてナラティブおよびコミュニティ主導のレベルにとどまっています。実際には、実現可能な可能性のある組み合わせの方向性は、主に次の 3 つの側面に反映されます。
<スパンリーフ="">(1)<スパンテキスト="">データのクラウドソーシングと権利確認<スパンリーフ=""><スパンテキスト="">——Web3 は、投稿者がオンチェーンのインセンティブとトレーサビリティのメカニズムを通じて現実世界のデータをアップロードすることを奨励しています。<スパンリーフ="">
<スパンリーフ="">(2)<スパンテキスト="">世界的なロングテールへの参加<スパンリーフ=""><スパンテキスト="">——国境を越えた少額決済と少額インセンティブの仕組みにより、データの収集と配布のコストが効果的に削減されます。<スパンリーフ="">
<スパンリーフ="">(3)<スパンテキスト="">金融化と共同イノベーション<スパンリーフ=""><スパンテキスト="">——DAOモデルはロボットの資産化、収入の伝票化、マシン間の決済メカニズムを促進することができます。
<スパンリーフ="">全体として、短期的には次のことが主な焦点となります。<スパンテキスト="">データ収集とインセンティブ層;中期的には「」となる見込み。<スパンテキスト="">安定した通貨支払い + ロングテールデータ集約「そして<スパンテキスト="">RaaS の資産化と決済レイヤー画期的な進歩を達成します。長期的には、人型ロボットが大規模に普及すれば、<スパンテキスト="">Web3 は、マシンの所有権、収益分配、ガバナンスの基盤となるシステムになる可能性があります、真の分散型マシン経済の形成を促進します。
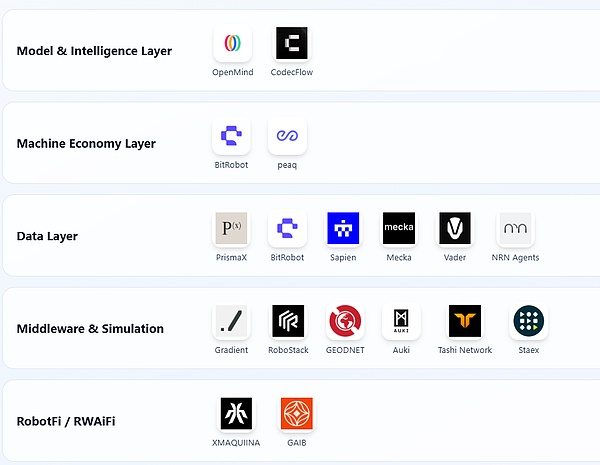
<スパンリーフ="">Web3ロボット生態マップと事例紹介
<スパンリーフ="">「検証可能な進歩、技術のオープン性、業界の関連性」の3つの基準に基づいて現状を整理<スパンテキスト="">Web3 × ロボティクス代表的なプロジェクトを5層構造で分類:<スパンテキスト="">モデルインテリジェンス層、機械経済層、データ収集層、認識およびシミュレーション基本層、およびロボット資産収入層。客観性を保つために、明らかな「ホットスポット」や情報が不十分な項目は削除しました。不足がある場合は修正してください。

<スパンリーフ="">モデル&モデルインテリジェンス
<スパンリーフ="">#<スパンリーフ="">Openmind – ロボット用の Android の構築
<スパンリーフ=""><スパンテキスト="">オープンマインド身体化された知能 (Embodied AI) とロボット制御のためのオープンソースのオペレーティング システム (ロボット OS) です。目標は、世界初の分散型ロボット動作環境と開発プラットフォームを構築することです。プロジェクトの中核は、次の 2 つの主要コンポーネントで構成されます。
- <リ>
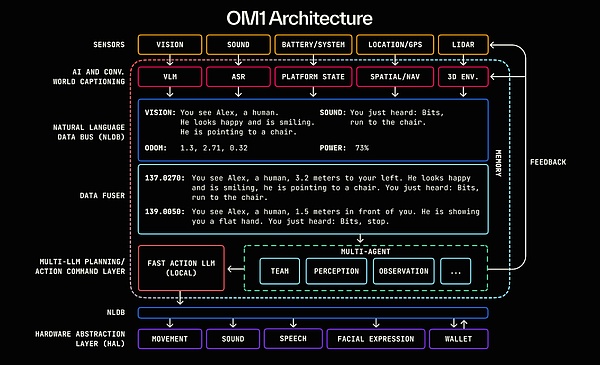
<スパンリーフ=""><スパンテキスト="">OM1: ROS2 上に構築されたモジュール式のオープンソース AI ランタイム レイヤー。認識、計画、アクションのパイプラインを調整し、デジタル ロボットと物理ロボットにサービスを提供するために使用されます。
<リ>
<スパンリーフ=""><スパンテキスト="">生地: 分散調整層 (ファブリック調整層) は、クラウド コンピューティングのパワー、モデル、実際のロボットを接続し、開発者が統合環境でロボットを制御およびトレーニングできるようにします。
<スパンリーフ="">OpenMind はその中核として次のように機能します。<スパンテキスト="">LLM (Large Language Model) とロボット世界の間のインテリジェントな中間層、言語知性が身体化された知性 (Embodied Intelligence) に真に変化することを可能にし、<スパンテキスト="">理解する(言語→動作)到着<スパンテキスト="">調整 (ブロックチェーン → ルール)知的な骨格。
<スパンリーフ="">OpenMind 多層システムは、完全な協調的な閉ループを実現します: 人間のパス<スパンテキスト="">OpenMind アプリはフィードバックと注釈 (RLHF データ) を提供し、ファブリック ネットワークは認証、タスク割り当て、決済プロトコル<スパンテキスト="">チューニング、OM1 ロボットがタスクを実行しますサービスを利用し、ブロックチェーン上の「ロボット構成」に従って行動監査と支払いを完了することで、<スパンテキスト="">ヒューマンフィードバック → タスク連携 → オンチェーン決済分散型マシンコラボレーションネットワーク。

<スパンリーフ="">プロジェクトの進捗状況と現実的な評価
<スパンリーフ="">OpenMind は、「技術的には運用可能だが商業的には利用できない」という初期段階にあります。コアシステム<スパンテキスト="">OM1 ランタイムは GitHub でオープンソース化されています。複数のプラットフォームで実行でき、マルチモーダル入力をサポートします。自然言語データ バス (NLDB) を通じて、言語からアクションへのタスクの理解を実現します。オリジナリティは高いですが、まだ実験的です。ファブリックネットワークとチェーン決済だけでインターフェース層の設計は完了します。
<スパンリーフ="">生態学的に、このプロジェクトは、<スパンテキスト="">Unitree、Ubtech、TurtleBot、Stanford、Oxford、Seoul Robotics などのオープン ハードウェア他大学との連携は主に教育研究検証に利用されており、まだ産業化されていない。このアプリは現在ベータ版ですが、インセンティブ機能とタスク機能はまだ初期段階にあります。
<スパンリーフ="">ビジネスモデルに関しては、OpenMind は構築しました<スパンテキスト="">OM1(オープンソースシステム) + Fabric(決済プロトコル) + Skill Marketplace(インセンティブ層)3 層エコシステムには現在収益がなく、約<スパンテキスト="">早期資金調達で2,000万ドル(パンテラ、Coinbase Ventures、DCG)。全体として、この技術は最先端を行っていますが、商業化とエコロジーはまだ初期段階にあります。Fabric の実装が成功すれば「身体化知能時代の Android」となることが期待されますが、サイクルが長く、リスクが高く、ハードウェアへの依存度が高いという課題があります。
<スパンリーフ="">#<スパンリーフ="">CodecFlow – ロボット工学用の実行エンジン
<スパンリーフ="">CodecFlow は、Solana ネットワークに基づく分散型実行層プロトコル (ファブリック) です。 AI エージェントとロボット システムにオンデマンドの実行環境を提供し、各エージェントが「インスタント マシン」を所有できるようにすることを目的としています。プロジェクトの中核は 3 つのモジュールで構成されます。
- <リ>
<スパンリーフ=""><スパンテキスト="">生地: クロスクラウド コンピューティングのパワー アグリゲーション レイヤー (Weaver + Shuttle + Gauge) は、AI タスク用の安全な仮想マシン、GPU コンテナー、またはロボット制御ノードを数秒で生成できます。
<リ>
<スパンリーフ=""><スパンテキスト="">オプトSDK: デスクトップ、シミュレーション、または実際のロボットを操作できる「オペレーター」の作成に使用されるエージェント実行フレームワーク (Python インターフェース)。
<リ>
<スパンリーフ=""><スパンテキスト="">トークンインセンティブ: オンチェーンのインセンティブおよび支払いレイヤーは、コンピューティング プロバイダー、エージェント開発者、自動タスク ユーザーを接続して、分散型コンピューティング能力とタスク市場を形成します。
<スパンリーフ="">CodecFlow の中心的な目標は、「AI とロボット オペレーターのための分散型実行ベース」を作成し、あらゆるエージェントがあらゆる環境 (Windows/Linux/ROS/MuJoCo/ロボット コントローラー) で安全に実行できるようにして、以下のすべてを実現することです。<スパンテキスト="">コンピューティング能力のスケジューリング(生地) →<スパンテキスト="">システム環境(システム層) →<スパンテキスト="">認識と行動(VLA オペレーター) 共通の実行アーキテクチャ。
<スパンリーフ="">プロジェクトの進捗状況と現実的な評価
<スパンリーフ="">以前のバージョンがリリースされました<スパンテキスト="">ファブリックフレームワーク(行く)<スパンテキスト="">オプトSDK(Python) を使用すると、Web ページまたはコマンド ライン環境で分離されたコンピューティング インスタンスを開始できます。Operator Market は 2025 年末に開始される予定で、AI コンピューティング能力の分散型実行レイヤーとして位置付けられています。主なサービス対象者はAI開発者、ロボット研究チーム、自動運用会社など。

<スパンリーフ="">マシンエコノミーレイヤー
<スパンリーフ="">#<スパンリーフ="">BitRobot – 世界のオープンなロボティクス ラボ
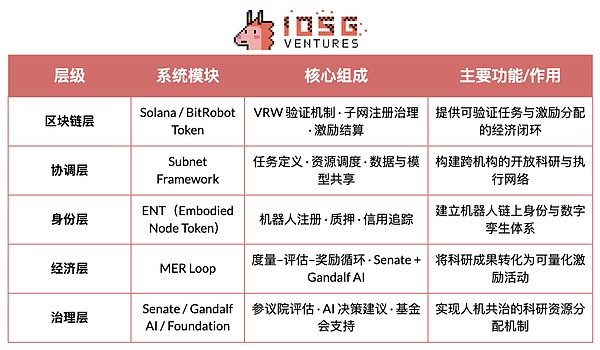
<スパンリーフ="">BitRobot は、身体化型 AI およびロボット向けに開発されたソフトウェアです。<スパンテキスト="">分散型科学研究および共同研究ネットワーク(Open Robotics Lab)、FrodoBots Labs と Protocol Labs が共同で立ち上げたもの。その中心となるビジョンは次のとおりです。<スパンテキスト="">「サブネット+インセンティブメカニズム+検証可能な作業(VRW)」のオープンアーキテクチャにより、コア機能には次のものが含まれます。
- <リ>
<スパンリーフ="">VRW (検証可能なロボット作業) 標準を通じて、各ロボット タスクの真の貢献を定義および検証します。
<リ>
<スパンリーフ="">ENT (Embodied Node Token) を通じてロボットにオンチェーンのアイデンティティと経済的責任を与えます。
<リ>
<スパンリーフ="">サブネットを介して、科学研究、コンピューティング能力、機器、オペレーター間の地域を越えたコラボレーションを組織します。
<リ>
<スパンリーフ="">Senate + Gandalf AI を通じて、「人間と機械の共同統治」によるインセンティブな意思決定と科学研究のガバナンスを実現できます。
<スパンリーフ="">2025 年のホワイト ペーパーのリリース以来、BitRobot は複数のサブネット (SN/01 ET Fugi、Virtuals Protocol による SN/05 SeeSaw など) を実行して、分散型リモート コントロールとリアル シナリオ データ収集を実現し、世界的なモデル開発における科学研究コンテストを促進するために 500 万ドルのグランド チャレンジ基金を立ち上げました。
<スパンリーフ="">#<スパンリーフ="">ピーク – モノの経済
<スパンリーフ="">Peaq は、マシン エコノミー向けに特別に構築されたレイヤー 1 ブロックチェーンで、マシン ID、オンチェーン ウォレット、アクセス コントロール、数百万のロボットやデバイスにナノ秒レベルの時刻同期 (ユニバーサル マシン タイム) などの基礎的な機能を提供します。同社の Robotics SDK を使用すると、開発者は最小限のコードでロボットを「マシン エコノミー対応」にすることができ、ベンダー間およびシステム間での相互運用性と対話が可能になります。
<スパンリーフ="">現在、peaq は世界初のトークン化されたロボット ファームを立ち上げ、60 を超える実世界のマシン アプリケーションをサポートしています。そのトークン化フレームワークは、ロボット企業が資本集約型のハードウェアの資金を調達し、従来の B2B/B2C からより広範なコミュニティ層にエンゲージメントを拡大するのに役立ちます。ネットワーク料金によって注入されるプロトコル レベルのインセンティブ プールにより、peaq は新しいデバイスへのアクセスを補助し、開発者をサポートし、ロボット工学および物理学 AI プロジェクトの加速的な拡大を推進する経済的なフライホイールを形成できます。

<スパンリーフ="">データ層
<スパンリーフ="">身体化された知能トレーニングにおける、希少かつ高価な高品質の実世界データの問題を解決することを目的としています。リモート コントロール (PrismaX、BitRobot Network)、一人称視点およびモーション キャプチャ (Mecka、BitRobot Network、Sapien、Vader、NRN)、シミュレーションおよび合成データ (BitRobot Network) を含む複数のパスを通じて人間とコンピューターのインタラクション データを収集および生成し、ロボット モデルにスケーラブルで一般化可能なトレーニングの基盤を提供します。
<スパンリーフ="">明確にする必要があるのは、<スパンテキスト="">, Web3は「データを生み出す」ことが苦手です。——ハードウェア、アルゴリズム、収集効率の点で、Web2 の巨人はどの DePIN プロジェクトよりもはるかに優れています。その本当の価値は、<スパンテキスト="">データの配布とインセンティブのメカニズムを再構築します。「安定した通貨決済ネットワーク+クラウドソーシングモデル」をベースに、パーミッションレスなインセンティブシステムとオンチェーンの権利確認メカニズムを通じて、低コストの小額決済、寄付のトレーサビリティ、自動利益分配を実現します。しかし、オープンクラウドソーシングは依然として、品質と需要の間の閉ループの問題に直面しています。データの品質は不均一であり、効果的な検証と安定した購入者が不足しています。
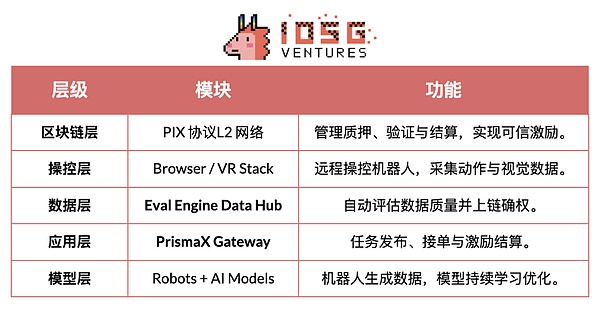
<スパンリーフ="">#<スパンリーフ="">プリズマックス
<スパンリーフ="">PrismaX は、身体化されたインテリジェンス (身体化された AI) のための分散型リモート コントロールおよびデータ経済ネットワークです。 「世界的なロボット労働市場」を構築し、人間のオペレーター、ロボット機器、AIモデルがオンチェーンのインセンティブシステムを通じて共進化できるようにすることを目指している。プロジェクトの中核は、次の 2 つの主要コンポーネントで構成されます。
- <リ>
<スパンリーフ=""><スパンテキスト="">遠隔操作スタック——リモート制御システム (ブラウザ/VR インターフェース + SDK) は、グローバルなロボットアームとサービスロボットを接続して、リアルタイムの人間制御とデータ収集を実現します。
<リ>
<スパンリーフ=""><スパンテキスト="">評価エンジン——データ評価および検証エンジン (CLIP + DINOv2 + オプティカル フロー セマンティック スコアリング)。各操作軌跡の品質スコアを生成し、決済のためにチェーンにアップロードします。
<スパンリーフ="">PrismaX は、分散型インセンティブ メカニズムを通じて人間の操作行動を機械学習データに変換し、<スパンテキスト="">遠隔制御→データ収集→モデルトレーニング→オンチェーン決済「人間の労働力がデータ資産」となる循環経済を実現する完全なクローズドループ。
<スパンリーフ="">プロジェクトの進捗状況と現実的な評価
<スパンリーフ="">PrismaX は 2025 年 8 月にベータ版 (gateway.prismax.ai) を開始しました。ユーザーはロボット アームを遠隔制御して把持実験を実行し、学習データを生成できます。Eval エンジンはすでに内部で実行されています。全体として、PrismaX テクノロジーは高度な実装と明確な位置付けを持っています。「人間の操作×AIモデル×ブロックチェーン決済」をつなぐ重要な中間層です。その長期的な可能性は「身体化されたインテリジェンスの時代における分散型の労働とデータのプロトコル」になることが期待されていますが、短期的には依然として規模の課題に直面しています。
<スパンリーフ="">#<スパンリーフ="">ビットロボットネットワーク
<スパンリーフ="">BitRobot Network は、サブネットを介してビデオ、リモート制御、シミュレーションなどのマルチソース データ収集を実現します。SN/01 ET Fugi を使用すると、ユーザーはロボットを遠隔制御してタスクを完了し、「現実の Pokémon Go スタイル」のインタラクションでナビゲーションと知覚データを収集できます。このゲームプレイは、現在カリフォルニア大学バークレー校 RAIL や Google DeepMind などの機関で使用されているヒューマン マシン ナビゲーション用の最大のオープンソース データセットの 1 つである FrodoBots-2K データセットの作成につながりました。SN/05 SeeSaw (仮想プロトコル) は、iPhone を使用して、実環境での大規模なクラウドソーシングを通じて一人称ビデオ データを収集します。RoboCap や Rayvo など、他の発表されたサブネットは、低コストの物理デバイスを使用して一人称ビデオ データを収集することに重点を置いています。
<スパンリーフ="">#<スパンリーフ="">メッカ
<スパンリーフ="">Mecka は、ゲーム化された携帯電話コレクションとカスタマイズされたハードウェア デバイスを使用して、一人称ビデオ、人間の動作データ、タスクのデモンストレーションをクラウドソーシングして、大規模なマルチモーダル データ セットを構築し、身体化された知能モデルのトレーニングをサポートするロボット データ会社です。
<スパンリーフ="">#<スパンリーフ="">サピエンス
<スパンリーフ="">Sapienは、「人の動きのデータ駆動型ロボット知能」を核としたクラウドソーシングプラットフォームです。ウェアラブル デバイスやモバイル アプリケーションを通じて人間の動き、姿勢、インタラクション データを収集し、身体化されたインテリジェンス モデルをトレーニングします。このプロジェクトは、世界最大の人間の動きのデータ ネットワークを構築し、自然な人間の行動をロボットの学習と一般化のための基本的なデータ ソースにすることに取り組んでいます。
<スパンリーフ="">#<スパンリーフ="">ベイダー
<スパンリーフ="">Vader は、現実世界の MMO アプリ EgoPlay を通じて一人称ビデオとタスク デモンストレーションをクラウドソーシングしています。ユーザーは一人称視点で日常の活動を記録し、報酬として VADER が支払われます。その ORN データ パイプラインは、オリジナルの POV 画像を、アクション ラベルやセマンティック ナラティブを含むプライバシー処理された構造化データ セットに変換し、ヒューマノイド ロボットの戦略トレーニングに直接使用できます。
<スパンリーフ="">#<スパンリーフ="">NRNエージェント
<スパンリーフ="">ブラウザー側のロボット制御とシミュレーション コンテストを通じて人間のデモンストレーション データをクラウドソーシングする、ゲーム化された身体化された RL データ プラットフォーム。 NRN は、「競合」タスクを通じてロングテール行動軌跡を生成します。これは模倣学習と継続的強化学習に使用され、シミュレーションから現実へのポリシー トレーニングをサポートするスケーラブルなデータ プリミティブとして機能します。
<スパンリーフ="">#<スパンリーフ="">具現化されたインテリジェントデータ収集層プロジェクトの比較

<スパンリーフ="">知覚とシミュレーション (ミドルウェアとシミュレーション)
<スパンリーフ="">知覚およびシミュレーション層は、位置決め、通信、空間モデリング、シミュレーション トレーニング、その他の機能を含む、ロボットが物理世界とインテリジェントな意思決定を接続するためのコア インフラストラクチャを提供します。それは、大規模な身体化されたインテリジェントシステムを構築するための「中間層スケルトン」です。現在、この分野はまだ初期の探査段階にあります。各プロジェクトは、高精度測位、共有空間コンピューティング、プロトコルの標準化、分散シミュレーションの方向で差別化されたレイアウトを形成しました。統一された標準や相互運用可能なエコシステムはまだありません。
<スパンリーフ="">ミドルウェアと空間インフラ
<スパンリーフ="">ロボットの核となる機能であるナビゲーション、位置決め、接続性、空間モデリングは、物理世界とインテリジェントな意思決定との間に重要な架け橋を形成します。より広範な DePIN プロジェクト (Silencio、WeatherXM、DIMO) は「ロボット」に言及し始めましたが、次のプロジェクトは身体化されたインテリジェンスに最も直接的に関連しています。
<スパンリーフ="">#<スパンリーフ="">RoboStack – クラウドネイティブなロボット操作スタック
<スパンリーフ="">RoboStack は、RCP (Robot Context Protocol) を介してロボット タスクのリアルタイム スケジューリング、リモート コントロール、クロスプラットフォーム相互運用性を実現し、クラウド シミュレーション、ワークフロー オーケストレーション、エージェント アクセス機能を提供するクラウドネイティブのロボット ミドルウェアです。
<スパンリーフ="">#<スパンリーフ="">GEODNET – 分散型 GNSS ネットワーク
<スパンリーフ="">GEODNET は、センチメートルレベルの RTK 高精度測位を提供するグローバル分散型 GNSS ネットワークです。分散型基地局とオンチェーンインセンティブを通じて、ドローン、自動運転、ロボットにリアルタイムの「地理参照レイヤー」を提供します。
<スパンリーフ="">#<スパンリーフ="">Auki – 空間コンピューティングのための Posemesh<スパンテキスト="">
<スパンリーフ="">Auki は、クラウドソーシング センサーとコンピューティング ノードを通じてリアルタイム 3D 環境マップを生成する分散型 Posemesh 空間コンピューティング ネットワークを構築し、AR、ロボット ナビゲーション、およびマルチデバイス コラボレーションのための共有空間ベンチマークを提供します。AR×ロボティクスの融合を促進する、仮想空間と現実シーンを繋ぐ重要なインフラです。
<スパンリーフ="">#<スパンリーフ="">Tashi Network — ロボット用のリアルタイム グリッド コラボレーション ネットワーク<スパンテキスト="">
<スパンリーフ="">分散型リアルタイム グリッド ネットワークにより、30 ミリ秒未満のコンセンサス、低遅延センサー交換、マルチロボット ステータス同期を実現します。その MeshNet SDK は、共有 SLAM、グループ コラボレーション、堅牢な地図更新をサポートし、組み込まれた AI に高性能のリアルタイム コラボレーション レイヤーを提供します。
<スパンリーフ="">#<スパンリーフ="">Staex — 分散型接続および遠隔測定ネットワーク<スパンテキスト="">
<スパンリーフ="">ドイツテレコムの研究開発部門から生まれた分散型接続レイヤーは、安全な通信、信頼できるテレメトリー、デバイスからクラウドへのルーティング機能を提供し、ロボット群が確実にデータを交換し、異なるオペレーター間で連携できるようにします。
<スパンリーフ="">シミュレーションおよびトレーニング システム (分散シミュレーションおよび学習)
<スパンリーフ="">#<スパンリーフ="">グラデーション – オープンインテリジェンスに向けて
<スパンリーフ="">Gradient は、「オープン インテリジェンス」を構築し、分散型インフラストラクチャに基づく分散型トレーニング、推論、検証、シミュレーションの実現に取り組む AI ラボです。現在のテクノロジー スタックには、Parallax (分散推論)、Echo (分散強化学習およびマルチエージェント トレーニング)、Gradient Cloud (企業向け AI ソリューション) が含まれています。ロボット工学の分野では、Mirage プラットフォームは分散シミュレーション、動的なインタラクティブ環境、身体化された知能トレーニングのための大規模な並列学習機能を提供し、世界モデルと一般的な戦略のトレーニングを加速します。Mirage は、Newton エンジンに関して NVIDIA との協力の可能性を模索しています。
<スパンリーフ="">ロボット資産収入層(RobotFi/RWAiFi)
<スパンリーフ="">この層は、ロボットを「生産ツール」から「金融資産」に変換する重要なリンクに焦点を当て、資産のトークン化、所得分配、分散型ガバナンスを通じて機械経済の金融インフラを構築します。代表的なプロジェクトには次のようなものがあります。
<スパンリーフ="">#<スパンリーフ="">XmaquinaDAO – 物理 AI DAO
<スパンリーフ="">XMAQUINA は分散型エコシステムであり、世界中のユーザーにトップレベルの人型ロボットや身体化インテリジェンス企業の流動性の高い参加チャネルを提供し、もともとベンチャーキャピタル機関のみが利用できた機会をチェーンにもたらします。そのトークン DEUS は、流動的なインデックス資産であると同時にガバナンスキャリアでもあり、財務配分と生態系開発を調整するために使用されます。DAO ポータルとマシン エコノミー ラウンチパッドを通じて、コミュニティはマシン資産のトークン化と構造化されたオンチェーン参加を通じて、新たな物理 AI プロジェクトを共同で開催し、サポートすることができます。
<スパンリーフ="">#<スパンリーフ="">GAIB – AI インフラストラクチャの経済層
<スパンリーフ="">GAIB は、GPU やロボットなどの物理 AI インフラストラクチャに統合経済レイヤーを提供し、分散資本を実際の AI インフラストラクチャ資産と接続し、検証可能で構成可能で収益性の高いインテリジェント経済システムを構築することに取り組んでいます。
<スパンリーフ="">ロボットの方向性において、GAIBは「ロボットトークンの販売」ではなく、ロボットの設備や運用契約(RaaS、データ収集、遠隔操作など)をチェーン上でファイナンス化することで「実質キャッシュフロー→チェーン上の可処分所得資産」への変革を実現します。このシステムは、ハードウェアのファイナンス(ファイナンシャル リース/質権)、営業キャッシュ フロー(RaaS/データ サービス)、データ フロー収益(ライセンス/契約)などをカバーし、ロボット資産とそのキャッシュ フローを測定可能、価格可能、取引可能にします。
<スパンリーフ="">GAIBは決済および収入キャリアとしてAID/sAIDを使用し、構造化されたリスク管理メカニズム(過剰担保、準備金、保険)を通じて安定した収益を保証し、DeFiデリバティブと流動性市場に長期的にアクセスし、「ロボット資産」から「組み合わせ可能な収入資産」までの財務的な閉ループを形成します。目標は、AI 時代のインテリジェンスの経済的バックボーンになることです
Web3ロボット生態マップ
<スパンリーフ="">概要と展望: 現実的な課題と長期的な機会
<スパンリーフ="">長期的な視点で見ると、<スパンテキスト="">ロボット×AI×Web3この統合は、分散型マシン経済システム (DeRobot Economy) を構築し、「単一マシンの自動化」から「確認可能な権利、決済可能な、ガバナンス」を備えたネットワーク化されたコラボレーションまで、具体化されたインテリジェンスを促進することを目的としています。そのコアロジックは「T」を介して行われます。<スパンテキスト="">トークン → デプロイメント → データ → 価値の再分配「ロボット、センサー、コンピューティングパワーノードが権利を確認し、取引し、利益を分配できるようにするために、自己循環メカニズムが形成されています。
<スパンリーフ="">ただし、実際的な観点から見ると、このモデルはまだ初期の探索段階にあり、安定したキャッシュ フローと大規模な商業クローズド ループの形成にはまだ程遠いです。ほとんどのプロジェクトは物語レベルにとどまっており、実際の展開は限られています。ロボットの製造と運用および保守は資本集約型の産業であり、トークンによるインセンティブだけではインフラの拡張をサポートできません。オンチェーンの財務設計は構成可能ですが、リスクの価格設定と実物資産の収益実現の問題はまだ解決されていません。したがって、いわゆる「マシンネットワークの自己循環」は依然として理想的なものであり、そのビジネスモデルは現実的に検証される必要があります。
- <リ>
<スパンリーフ=""><スパンテキスト="">モデルインテリジェンス層<スパンリーフ=""><スパンテキスト="">(モデルとインテリジェンス層) は現在、最も長期的な価値を持つ方向です。OpenMind に代表されるオープンソースのロボット オペレーティング システムは、閉鎖的なエコシステムを打破し、複数のロボットのコラボレーションと言語とアクションのインターフェイスを統合しようとしています。技術ビジョンは明確でシステムは完成しているが、プロジェクト量が膨大で検証サイクルが長く、業界レベルでのポジティブなフィードバックはまだ形成されていない。
<リ>
<スパンリーフ=""><スパンテキスト="">マシンエコノミー層<スパンリーフ=""><スパンテキスト="">(マシンエコノミー層)はまだ準備段階です。実際には、ロボットの数は限られており、DID ID とインセンティブ ネットワークが自己矛盾のないサイクルを形成することは困難です。 「機械労働経済」にはまだ程遠い。将来的には、身体化されたインテリジェンスが大規模に展開されて初めて、オンチェーンのアイデンティティ、決済、およびコラボレーションのネットワークの経済効果が真に現れるでしょう。
<リ>
<スパンリーフ=""><スパンテキスト="">データ収集層<スパンリーフ=""><スパンテキスト="">(データ層) データ収集層は閾値が最も低いですが、現時点では商業化の可能性に最も近い層です。身体化されたインテリジェントなデータ収集には、品質と再利用性を決定する極めて高い時空間的連続性とアクションの意味論的精度が必要です。「クラウドソーシングの規模」と「データの信頼性」のバランスをどう取るかが業界の中心的な課題です。PrismaXは、まずBサイドのニーズをターゲットにし、タスクの収集と検証を分散して、ある程度複製可能なテンプレートを提供しますが、エコロジカルなスケールとデータトランザクションの蓄積にはまだ時間がかかります。
<リ>
<スパンリーフ=""><スパンテキスト="">知覚およびシミュレーション層<スパンリーフ=""><スパンテキスト="">(ミドルウェアとシミュレーション層) まだ技術検証期間にあり、相互運用可能なエコシステムを形成するための統一された標準やインターフェースがありません。シミュレーション結果を標準化して実際の環境に転送するのは難しく、Sim2Real の効率には限界があります。
<リ>
<スパンリーフ=""><スパンテキスト="">資産収入層<スパンリーフ=""><スパンテキスト="">(RobotFi / RWAiFi) Web3 は、産業ロジックを再構築するのではなく、主にサプライ チェーン ファイナンス、機器リース、投資ガバナンスにおいて補助的な役割を果たし、透明性と決済効率を向上させます。
<スパンリーフ="">もちろん、ロボット × AI × Web3 の交差点が次世代のインテリジェント経済システムの起源であると私たちは信じています。それは技術的パラダイムの融合であるだけでなく、生産関係を再構築する機会でもあります。機械がアイデンティティ、インセンティブ、ガバナンスメカニズムを備えれば、人間と機械のコラボレーションは部分的な自動化からネットワーク化された自律性へと移行します。短期的には、この方向性は依然として物語と実験によって支配されていますが、それが築いた制度的およびインセンティブの枠組みは、将来の機械社会の経済秩序の基礎を築きつつあります。長期的な観点から見ると、身体化されたインテリジェンスと Web3 の組み合わせは、価値創造の境界を再構築し、インテリジェント エージェントを真に識別可能で、協力的で、収益性の高い経済主体にするでしょう。