المؤلف: جاكوب تشاو @IOSG
<ب><سبان ليف = "">بانوراما الروبوت: من الأتمتة الصناعية إلى الذكاء البشري
<سبان ليف = "">شكلت سلسلة صناعة الروبوتات التقليدية نظامًا متعدد الطبقات من الأسفل إلى الأعلى، يغطي كل شيءالمكونات الأساسية – نظام التحكم الوسيط – تصنيع الآلة بالكامل – تكامل التطبيقاتأربع روابط رئيسية.المكونات الأساسية(وحدة التحكم، المؤازرة، المخفض، المستشعر، البطارية، إلخ.) الحاجز الفني هو الأعلى، والذي يحدد الحد الأدنى لأداء الماكينة الإجمالي والتكلفة؛نظام التحكموهو “الدماغ والمخيخ” للروبوت، المسؤول عن اتخاذ القرار والتخطيط والتحكم في الحركة؛تصنيع الآلة بالكاملتعكس قدرات تكامل سلسلة التوريد.تكامل النظام وتطبيقهأصبح تحديد عمق التسويق جوهرًا جديدًا للقيمة.
<سبان ليف = "">ووفقا لسيناريوهات ونماذج التطبيق، فإن الروبوتات العالمية تتبع “الأتمتة الصناعية → ذكاء السيناريو → الذكاء العام“لقد شكل تطور المسار خمسة أنواع رئيسية:الروبوتات الصناعية، والروبوتات المتنقلة، وروبوتات الخدمة، والروبوتات الخاصة، والروبوتات البشرية
<ب><سبان ليف = "">#<ب><سبان ليف = "">روبوت صناعي(الروبوتات الصناعية)
<سبان ليف = "">حاليًا هو المسار الوحيد الشامل والناضج، ويستخدم على نطاق واسع في عمليات التصنيع مثل اللحام والتجميع والرش والمناولة.شكلت الصناعة نظامًا موحدًا لسلسلة التوريد، مع هامش ربح إجمالي مستقر وعائد استثمار واضح.تؤكد إحدى الفئات الفرعية، الروبوتات التعاونية (Cobots)، على التعاون بين الإنسان والآلة، وهي خفيفة الوزن وسهلة النشر، وتنمو بشكل أسرع.
<سبان ليف = "">مؤسسة تمثيلية:ايه بي بي، فانوك، ياسكاوا، كوكا، الروبوتات العالمية، جيكا، أوبو.
<ب><سبان ليف = "">#<ب><سبان ليف = "">روبوت متنقل(الروبوتات المتنقلة)
<سبان ليف = "">بما في ذلك AGV (المركبة الموجهة تلقائيًا) وAMR (الروبوت المتنقل المستقل)، فقد تم تنفيذها على نطاق واسع في التخزين اللوجستي وتوزيع التجارة الإلكترونية ونقل التصنيع، وأصبحت الفئات الأكثر نضجًا على الجانب B.
<سبان ليف = "">مؤسسة تمثيلية: Amazon Robotics، Geek+، Quicktron، Locus Robotics.
<ب><سبان ليف = "">#<ب><سبان ليف = "">روبوت الخدمة(روبوتات الخدمة)
<سبان ليف = "">تستهدف صناعات مثل التنظيف والمطاعم والفنادق والتعليم، وهي المنطقة الأسرع نموًا من جانب المستهلك.لقد دخلت منتجات التنظيف منطق الإلكترونيات الاستهلاكية، ويعمل التوزيع الطبي والتجاري على تسريع عملية التسويق التجاري. بالإضافة إلى ذلك، هناك عدد من الروبوتات العاملة ذات الأغراض العامة آخذة في الظهور (مثل نظام Dyna ثنائي الذراع) – وهي أكثر مرونة من المنتجات الخاصة بمهام محددة، ولكنها ليست متعددة الاستخدامات مثل الروبوتات البشرية.
<سبان ليف = "">مؤسسة تمثيلية: Ecovacs، Roborock Technology، Pudu Technology، Qinglang Intelligence، iRobot، Dyna، إلخ.
<ب><سبان ليف = "">#<ب><سبان ليف = "">روبوت خاص
<سبان ليف = "">إنه يخدم بشكل أساسي سيناريوهات مثل الرعاية الطبية والصناعة العسكرية والبناء والبحرية والفضاء.حجم السوق محدود ولكن هامش الربح مرتفع والحواجز قوية. ويعتمد في الغالب على طلبات الحكومة والشركات وهو في مرحلة نمو التجزئة الرأسية.وتشمل المشاريع النموذجيةIntuitive Surgical، وBoston Dynamics، وANYbotics، وNASA Valkyrie، والمزيد.
<ب><سبان ليف = "">#<ب><سبان ليف = "">روبوت بشري(الروبوتات البشرية)
<سبان ليف = "">تعتبر “منصة القوى العاملة العالمية” للمستقبل.
<سبان ليف = "">مؤسسة تمثيلية:Tesla (Optimus)، Figure AI (الشكل 01)، Sanctuary AI (Phoenix)، Agility Robotics (Digit)، Apptronik (Apollo)، 1X Robotics، Neura Robotics، Unitree، UBTECH، Zhiyuan Robot، إلخ.
<سبان ليف = "">الروبوتات البشرية هي الاتجاه الحدودي الذي يجذب أكبر قدر من الاهتمام في الوقت الحالي.تكمن قيمته الأساسية في تكييف الهياكل البشرية مع المساحات الاجتماعية الحالية ويعتبر شكلاً رئيسياً يؤدي إلى “منصة عمل عالمية”. على عكس الروبوتات الصناعية التي تسعى إلى تحقيق الكفاءة القصوى، تؤكد الروبوتات البشريةالقدرة على التكيف العام ونقل المهام، يمكن أن تدخل المصانع والمنازل والأماكن العامة دون تعديل البيئة.
<سبان ليف = "">حاليًا، لا تزال معظم الروبوتات البشرية عالقةمرحلة عرض التكنولوجيا، والتحقق بشكل أساسي من التوازن الديناميكي وقدرات المشي والتشغيل.على الرغم من وجود بعض المشاريع بالفعلتسيطر عليها للغايةبدأت عمليات النشر على نطاق صغير (مثل الشكل × BMW وAgility Digit) في سيناريوهات المصانع، ومن المتوقع أن يدخل المزيد من الشركات المصنعة (مثل 1X) في التوزيع المبكر اعتبارًا من عام 2026، لكن هذه لا تزال قائمةتطبيق مقيد لـ “مشهد ضيق، مهمة واحدة”، بدلاً من تنفيذ قوة عمل عالمية بالمعنى الحقيقي.بشكل عام، سيستغرق الأمر عدة سنوات قبل تسويقه على نطاق واسع. تشمل الاختناقات الأساسية ما يلي: مشاكل التحكم مثل التنسيق متعدد درجات الحرية والتوازن الديناميكي في الوقت الفعلي؛ مشكلات استهلاك الطاقة وعمر البطارية محدودة بكثافة طاقة البطارية وكفاءة القيادة؛روابط الإدراك وصنع القرار التي تكون عرضة لعدم الاستقرار ويصعب تعميمها في بيئة مفتوحة؛ فجوات كبيرة في البيانات (يصعب دعم التدريب على الاستراتيجية العامة)؛ ولم يتم التغلب بعد على الهجرة عبر الجسد؛ ولا تزال سلاسل توريد الأجهزة ومنحنيات التكلفة (وخاصة خارج الصين) تشكل عتبات واقعية، مما يزيد من صعوبة تحقيق النشر على نطاق واسع ومنخفض التكلفة.
<سبان ليف = "">من المتوقع أن يمر مسار التسويق المستقبلي بثلاث مراحل: قصيرة المدى والعرض التجريبي كخدمةبالأساس، الاعتماد على المشاريع الرائدة والإعانات؛على المدى المتوسط، سوف يتطور إلىالروبوتات كخدمة (RaaS)وبناء بيئة المهام والمهارات؛ على المدى الطويلسحابة القوى العاملةمعخدمة الاشتراك الذكيوباعتبارنا جوهرًا، فإننا نشجع تحول التركيز على القيمة من تصنيع الأجهزة إلى شبكات البرمجيات والخدمات. بشكل عام، تمر الروبوتات الشبيهة بالبشر بفترة انتقالية حرجة من العرض التوضيحي إلى التعلم الذاتي. وما إذا كان بإمكانهم تجاوز العتبة الثلاثية للتحكم والتكلفة والخوارزمية في المستقبل سيحدد ما إذا كان بإمكانهم حقًا تحقيق الذكاء المتجسد.
<ب><سبان ليف = "">الذكاء الاصطناعي × الروبوتات: فجر عصر الذكاء المتجسد
<سبان ليف = "">تعتمد الأتمتة التقليدية بشكل أساسي على البرمجة المسبقة والتحكم في خطوط الأنابيب (مثل بنية DSOP الخاصة بالاستشعار والتخطيط والتحكم) ولا يمكن تشغيلها بشكل موثوق إلا في بيئة منظمة.العالم الحقيقي أكثر تعقيدًا وقابلية للتغيير، ويتبع الجيل الجديد من الذكاء المتجسد (الذكاء الاصطناعي المتجسد) نموذجًا آخر: من خلال النماذج الكبيرة والتعلم التمثيلي الموحد، تتمتع الروبوتات بالقدرة على “الفهم والتنبؤ والتصرف” عبر السيناريوهات.التركيز على الذكاء المتجسدالجسم (الأجهزة) + الدماغ (النموذج) + البيئة (التفاعل)اقتران ديناميكي، الروبوت هو الناقل، والذكاء هو الجوهر.
<سبان ليف = "">ينتمي الذكاء الاصطناعي التوليدي إلىالذكاء في عالم اللغةجيد في فهم الرموز والدلالات؛ الذكاء الاصطناعي المتجسد ينتمي إلىذكاء العالم الحقيقي، إتقان الإدراك والعمل. ويتوافق الاثنان مع “الدماغ” و”الجسم” على التوالي، ويمثلان خطين رئيسيين متوازيين لتطور الذكاء الاصطناعي.من منظور مستوى الذكاء، يعد الذكاء المتجسد أكثر تقدمًا من الذكاء الاصطناعي التوليدي، لكن نضجه لا يزال متأخرًا بشكل كبير.تعتمد LLM على المجموعة الضخمة من الإنترنت لتشكيل حلقة مغلقة واضحة من “البيانات ← قوة الحوسبة ← النشر”؛بينما يتطلب ذكاء الروبوتالمنظور الأول، متعدد الوسائط، البيانات مرتبطة بقوة بالإجراءات—— بما في ذلك مسارات التحكم عن بعد، ومقاطع الفيديو من منظور الشخص الأول، والخرائط المكانية، وتسلسلات العمليات، وما إلى ذلك. هذه البياناتغير موجود بشكل طبيعي، يجب أن يتم إنشاؤها من خلال تفاعل حقيقي أو محاكاة عالية الدقة، وبالتالي فهي أكثر ندرة وتكلفة.على الرغم من أن المحاكاة والبيانات الاصطناعية مفيدة، إلا أنها لا تزال غير قادرة على استبدال تجربة استشعار الحركة الحقيقية. ولهذا السبب يجب على Tesla وFiger وما إلى ذلك بناء مصانع بيانات التشغيل عن بعد الخاصة بهم، وكذلك سبب ظهور مصانع التعليقات التوضيحية للبيانات التابعة لجهات خارجية في جنوب شرق آسيا.باختصار:تتعلم LLM من البيانات المتاحة بسهولة، في حين يجب على الروبوتات “إنشاء” البيانات من خلال التفاعل مع العالم المادي.في السنوات الخمس إلى العشر القادمة، سيتم دمج الاثنين بشكل عميق في نموذج الرؤية – اللغة – العمل وبنية الوكيل المتجسد – LLM مسؤول عن الإدراك والتخطيط عالي المستوى، والروبوت مسؤول عن التنفيذ في العالم الحقيقي، وتشكيل حلقة مغلقة في اتجاهين من البيانات والعمل، بشكل مشترك لتعزيز الذكاء الاصطناعي من “الذكاء اللغوي” إلى الذكاء الحقيقي.المخابرات العامة (AGI).
<سبان ليف = "">يمكن اعتبار نظام التكنولوجيا الأساسي للذكاء المتجسد بمثابة كومة ذكاء من القاعدة إلى القمة:VLA (دمج الإدراك)، RL/IL/SSL (التعلم الذكي)، Sim2Real (نقل الواقع)، النموذج العالمي (النمذجة المعرفية)، والتعاون متعدد الوكلاء واستدلال الذاكرة (Swarm & Reasoning).من بينها، VLA وRL/IL/SSL هي “محركات” الذكاء المتجسد، والتي تحدد تنفيذها وتسويقها؛ تعد Sim2Real وWorld Model من التقنيات الرئيسية التي تربط بين التدريب الافتراضي والتنفيذ في العالم الحقيقي؛يمثل التعاون متعدد الوكلاء واستدلال الذاكرة تطورًا جماعيًا وفوق معرفي على مستوى أعلى.

<ب><سبان ليف = "">الفهم الإدراكي: نموذج الرؤية-اللغة-الفعل (الرؤية-اللغة-الفعل)
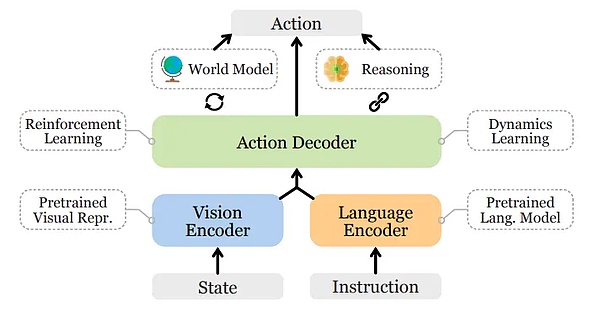
<سبان ليف = "">يتكامل نموذج VLAالرؤية – اللغة – العملثلاث قنوات تمكن الروبوت من فهم نوايا اللغة البشرية وترجمتها إلى سلوكيات تشغيلية محددة.تتضمن عملية التنفيذ التحليل الدلالي، والتعرف على الهدف (تحديد موقع الكائنات المستهدفة من المدخلات المرئية)، وتخطيط المسار وتنفيذ الإجراء، وبالتالي تحقيق حلقة مغلقة من “فهم الدلالات – إدراك العالم – إكمال المهام”، وهو أحد الإنجازات الرئيسية في الذكاء المتجسد.وتشمل المشاريع التمثيلية الحاليةجوجل RT-X وMeta Ego-Exo وFiger Helix، مما يدل على التوالي على أحدث الاتجاهات مثل الفهم متعدد الوسائط والإدراك الغامر والتحكم المعتمد على اللغة.
<سبان ليف = "">حاليًا، لا تزال VLA في مراحلها الأولى وتواجه أربع اختناقات أساسية:
- <لي>
<ب><سبان ليف = "">الغموض الدلالي وضعف تعميم المهمة<سبان ليف = "">: تواجه النماذج صعوبة في فهم التعليمات الغامضة والمفتوحة؛<لي>
<ب><سبان ليف = "">محاذاة غير مستقرة للرؤية والحركة<سبان ليف = "">: يتم تضخيم أخطاء الإدراك في تخطيط المسار وتنفيذه؛<لي>
<ب><سبان ليف = "">البيانات المتعددة الوسائط نادرة والمعايير غير متسقة<سبان ليف = "">: تكلفة التجميع ووضع العلامات مرتفعة، مما يجعل من الصعب تشكيل دولاب الموازنة للبيانات على نطاق واسع؛<لي>
<ب><سبان ليف = "">تحديات محور الزمن ومحور الفضاء للمهام طويلة المدى<سبان ليف = "">: تؤدي فترة المهمة الطويلة جدًا إلى عدم كفاية إمكانات التخطيط والذاكرة، في حين أن النطاق المكاني الكبير جدًا يتطلب من النموذج التفكير في أشياء “خارج مجال الرؤية”. تفتقر VLA الحالية إلى نماذج عالمية مستقرة وقدرات التفكير عبر الفضاء.
<سبان ليف = "">تحد هذه المشكلات بشكل مشترك من القدرة على التعميم عبر السيناريوهات وعملية التنفيذ واسعة النطاق لـ VLA.
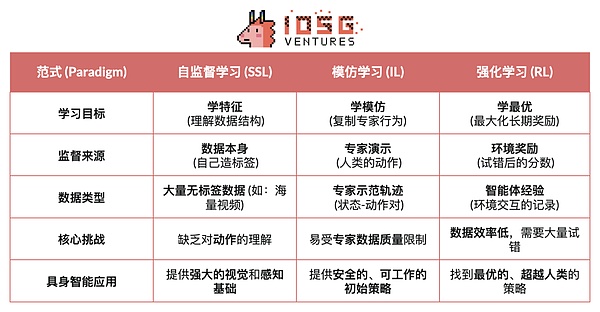
<ب><سبان ليف = "">التعلم الذكي: التعلم الخاضع للإشراف الذاتي (SSL)، والتعلم بالتقليد (IL)، والتعلم المعزز (RL)
- <لي>
<ب><سبان ليف = "">التعلم الخاضع للإشراف الذاتي<سبان ليف = "">(التعلم تحت الإشراف الذاتي): استخراج الميزات الدلالية تلقائيًا من البيانات الحسية للسماح للروبوتات “بفهم العالم”.إنه يعادل السماح للآلة بالتعلمالملاحظة والتمثيل.<لي>
<ب><سبان ليف = "">التعلم بالتقليد<سبان ليف = "">(التعلم بالتقليد): إتقان المهارات الأساسية بسرعة من خلال تقليد العروض البشرية أو أمثلة الخبراء.إنه يعادل السماح للآلة بالتعلمالتصرف كإنسان.<لي>
<ب><سبان ليف = "">التعلم المعزز<سبان ليف = "">(التعلم المعزز): من خلال آلية “المكافأة والعقاب”، يقوم الروبوت بتحسين استراتيجية عمله من خلال التجربة والخطأ المستمرين.إنه يعادل السماح للآلة بالتعلمتنمو من خلال التجربة والخطأ.
<سبان ليف = "">في الذكاء الاصطناعي المتجسد، يهدف التعلم ذاتي الإشراف (SSL) إلى السماح للروبوتات بالتنبؤ بتغيرات الحالة والقوانين الفيزيائية من خلال البيانات الحسية، وبالتالي فهم البنية السببية للعالم؛ يعد التعلم المعزز (RL) هو المحرك الأساسي لتكوين الذكاء، حيث يدفع الروبوتات لإتقان السلوكيات المعقدة مثل المشي والإمساك وتجنب العوائق من خلال التفاعل مع البيئة وتحسين التجربة والخطأ بناءً على إشارات المكافأة؛يعمل التعلم بالتقليد (IL) على تسريع هذه العملية من خلال العرض البشري، مما يسمح للروبوتات باكتساب الإجراءات المسبقة بسرعة.الاتجاه السائد الحالي هو الجمع بين الثلاثة لبناء إطار تعليمي هرمي: يوفر SSL أساسًا تمثيليًا، ويعطي IL الأسبقية البشرية، ويحرك التعلم العميق تحسين السياسات لتحقيق التوازن بين الكفاءة والاستقرار، والتي تشكل معًا الآلية الأساسية للذكاء المتجسد من الفهم إلى العمل.
<ب><سبان ليف = "">الهجرة الواقعية: Sim2Real – القفزة من المحاكاة إلى الواقع
<سبان ليف = "">Sim2Real(المحاكاة للواقع) هو السماح للروبوتات بإكمال التدريب في بيئة افتراضية ومن ثم الهجرة إلى العالم الحقيقي.ويستخدم بيئات محاكاة عالية الدقة مثلنفيديا إسحاق سيم & أومنيفرس، ديب مايند MuJoCo) يولد بيانات تفاعلية واسعة النطاق، مما يقلل بشكل كبير من تكاليف التدريب وتآكل الأجهزة.جوهرها هو الحد من “محاكاة فجوة الواقع“، وتشمل الطرق الرئيسية ما يلي:
- <لي>
<ب><سبان ليف = "">العشوائية المجال<سبان ليف = "">(التوزيع العشوائي للمجال): ضبط الإضاءة والاحتكاك والضوضاء والمعلمات الأخرى بشكل عشوائي أثناء المحاكاة لتحسين قدرة تعميم النموذج؛<لي>
<ب><سبان ليف = "">معايرة الاتساق البدني<سبان ليف = "">: استخدم بيانات الاستشعار الحقيقية لمعايرة محرك المحاكاة لتعزيز الدقة المادية؛<لي>
<ب><سبان ليف = "">الضبط الدقيق التكيفي<سبان ليف = "">(الضبط الدقيق التكيفي): إجراء إعادة تدريب سريعة في البيئة الحقيقية لتحقيق هجرة مستقرة.
<سبان ليف = "">Sim2Real هو الرابط المركزي في تنفيذ الذكاء المتجسد، مما يمكّن نماذج الذكاء الاصطناعي من تعلم الحلقة المغلقة من “التحكم في الإدراك والقرار” في عالم افتراضي آمن ومنخفض التكلفة.لقد نضجت Sim2Real في التدريب على المحاكاة (مثل NVIDIA Isaac Sim وMuJoCس)، ولكن الهجرة إلى الواقع لا تزال مقيدة بفجوة الواقع، والقدرة الحاسوبية العالية وتكاليف وضع العلامات، فضلا عن عدم كفاية التعميم والأمن في بيئة مفتوحة.على الرغم من ذلك، أصبحت المحاكاة كخدمة (SimaaS) هي البنية التحتية الأخف وزنًا والأكثر قيمة من الناحية الاستراتيجية في عصر الذكاء المتجسد.يتضمن نموذج أعمالها الاشتراك في النظام الأساسي (PaaS)، وتوليد البيانات (DaaS)، والتحقق الأمني (VaaS).
<ب><سبان ليف = "">النمذجة المعرفية: النموذج العالمي – “العالم الداخلي” للروبوت
<سبان ليف = "">نموذج عالمي(النموذج العالمي) هو “العقل الداخلي” للذكاء المتجسد، مما يسمح للروبوتات بمحاكاة البيئة داخليًا وعواقب العمل لتحقيق التنبؤ والاستدلال.فهو يبني تمثيلاً داخليًا يمكن التنبؤ به من خلال تعلم القوانين الديناميكية للبيئة، مما يسمح للوكيل “بمعاينة” النتائج قبل التنفيذ، والتطور من منفذ سلبي إلى مفكر نشط. تشمل المشاريع التمثيلية DeepMind Dreamer، وGoogle Gemini + RT-2، وTesla FSD V12، وNVIDIA WorldSim، وما إلى ذلك.وتشمل مسارات التكنولوجيا النموذجية ما يلي:
- <لي>
<ب><سبان ليف = "">نمذجة المتغير الكامن<سبان ليف = "">(نمذجة الديناميكيات الكامنة): ضغط الإدراك عالي الأبعاد في مساحة الحالة الكامنة؛<لي>
<ب><سبان ليف = "">تدريب خيال التنبؤ بالسلاسل الزمنية<سبان ليف = "">(التخطيط القائم على الخيال): التجربة الافتراضية والخطأ والتنبؤ بالمسار في النموذج؛<لي>
<ب><سبان ليف = "">التعلم المعزز القائم على النموذج<سبان ليف = "">(RL القائم على النموذج): استبدل البيئة الحقيقية بنموذج عالمي لتقليل تكاليف التدريب.
<سبان ليف = "">يعتبر النموذج العالمي في الطليعة النظرية للذكاء المتجسد وهو المسار الأساسي للروبوتات للانتقال من الذكاء “التفاعلي” إلى الذكاء “التنبئي”.ومع ذلك، فإنه لا يزال مقيدًا بتحديات مثل النمذجة المعقدة، والتنبؤات غير المستقرة على المدى الطويل، والافتقار إلى معايير موحدة.
<ب><سبان ليف = "">سرب الذكاء ومنطق الذاكرة: من العمل الفردي إلى الإدراك التعاوني
<سبان ليف = "">تمثل الأنظمة متعددة الوكلاء والذاكرة والاستدلال اتجاهين مهمين في تطور الذكاء المتجسد من “الذكاء الفردي” إلى “الذكاء الجماعي” و”الذكاء المعرفي”.ويدعم الاثنان بشكل مشترك النظام الذكيالتعلم التعاونيمعالتكيف على المدى الطويلالقدرة.
<ب><سبان ليف = "">#<ب><سبان ليف = "">التعاون متعدد الوكلاء (Swarm/Cooperative RL):
<سبان ليف = "">ويشير إلى تحقيق اتخاذ القرار التعاوني وتخصيص المهام من قبل وكلاء متعددين في بيئة مشتركة من خلال التعلم المعزز الموزع أو التعاوني.هناك أساس بحثي متين في هذا الاتجاه، مثلتوضح تجربة OpenAI Hide-and-Seek التعاون التلقائي بين العديد من الوكلاء وظهور الإستراتيجية، وخوارزميات DeepMind QMIX وMADDPGيوفر إطارًا تعاونيًا للتدريب المركزي والتنفيذ اللامركزي.تم تطبيق هذا النوع من الأساليب والتحقق منه في سيناريوهات مثل جدولة روبوت المستودع والتفتيش والتحكم في المجموعة.
<ب><سبان ليف = "">#<ب><سبان ليف = "">الذاكرة والتفكير
<سبان ليف = "">يعد التركيز على تزويد الوكلاء بالذاكرة طويلة المدى والفهم الظرفي وقدرات التفكير السببي اتجاهًا رئيسيًا لتحقيق نقل المهام المشتركة والتخطيط الذاتي.نموذجيتشمل الأبحاث DeepMind Gato (وكيل متعدد المهام موحد للتحكم في الإدراك واللغة) وسلسلة DeepMind Dreamer (التخطيط الخيالي المبني على النموذج العالمي)، بالإضافة إلى الوكلاء المتجسدين المفتوحين مثل Voyager، الذين يستخدمون الذاكرة الخارجية لـتحقيق التعلم المستمر مع التطور الذاتي.تضع هذه الأنظمة الأساس للروبوتات لتكون لديها القدرة على “تذكر الماضي واستنتاج المستقبل”.
<ب><سبان ليف = "">المشهد العالمي المتجسد لصناعة الاستخبارات: التعاون والمنافسة يتعايشان

<سبان ليف = "">تمر صناعة الروبوتات العالمية بفترة “تعميق التعاون والمنافسة”.إن كفاءة سلسلة التوريد في الصين، وقدرات الذكاء الاصطناعي في الولايات المتحدة، ودقة قطع الغيار في اليابان، والمعايير الصناعية في أوروبا ستشكل معًا النمط طويل المدى لصناعة الروبوتات العالمية.
- <لي>
<ب><سبان ليف = "">الولايات المتحدة<سبان ليف = "">ابق في الطليعة في نماذج وبرامج الذكاء الاصطناعي المتطورة (DeepMind، وOpenAI، وNVIDIA)، ولكن هذه الميزة لا تمتد إلى أجهزة الروبوتات.يتمتع المصنعون الصينيون بمزايا أكبر في سرعة التكرار وأداء مشهد الحياة الواقعية.وقد شجعت الولايات المتحدة إعادة الصناعات إلى الوطن من خلال قانون تشيبس وقانون الحد من التضخم (إيرا).<لي>
<ب><سبان ليف = "">الصين<سبان ليف = "">بالاعتماد على التصنيع واسع النطاق والتكامل الرأسي والتطوير الموجه بالسياسات، فقد شكلت مزايا رائدة في مجالات قطع الغيار والمصانع الآلية والروبوتات البشرية، وتتمتع بقدرات متميزة في مجال الأجهزة وسلسلة التوريد.حققت Yushu وUBTECH إنتاجًا ضخمًا وتمتد إلى مستوى اتخاذ القرار الذكي.ومع ذلك، لا تزال هناك فجوة كبيرة بين الصين والولايات المتحدة من حيث الخوارزميات والتدريب على المحاكاة.<لي>
<ب><سبان ليف = "">اليابان<سبان ليف = "">لديها احتكار طويل الأمد للمكونات عالية الدقة وتكنولوجيا التحكم في الحركة، ونظامها الصناعي مستقر.ومع ذلك، لا يزال تكامل نموذج الذكاء الاصطناعي في مراحله الأولى، ووتيرة الابتكار مستقرة نسبيًا.<لي>
<ب><سبان ليف = "">كوريا الجنوبية<سبان ليف = "">إنها متميزة في نشر الروبوتات الاستهلاكية – بقيادة شركات مثل LG وNAVER Labs، وتتمتع بنظام بيئي ناضج وقوي للروبوتات الخدمية.<لي>
<ب><سبان ليف = "">أوروبا<سبان ليف = "">اكتمل النظام الهندسي ومعايير السلامة، وتظل شركة 1X Robotics وغيرها نشطة على مستوى البحث والتطوير، ولكن تم نقل بعض روابط التصنيع، وأصبح تركيز الابتكار متحيزًا نحو التعاون والتوحيد القياسي.
<ب><سبان ليف = "">الروبوت × الذكاء الاصطناعي × Web3: رؤية سردية ومسار واقعي
<سبان ليف = "">في عام 2025، تظهر قصة جديدة في صناعة Web3 تندمج مع الروبوتات والذكاء الاصطناعي.على الرغم من أن Web3 يعتبر البروتوكول الأساسي لاقتصاد الآلة اللامركزية، إلا أن قيمته المجمعة وجدواه على مستويات مختلفة لا تزال متمايزة بشكل واضح:
- <لي>
<ب><سبان ليف = "">تصنيع الأجهزة وطبقة الخدمة<سبان ليف = "">حلقة مغلقة كثيفة رأس المال وضعيفة البيانات، يمكن لـ Web3 حاليًا أن تلعب فقط دورًا مساعدًا في الروابط الطرفية مثل تمويل سلسلة التوريد أو تأجير المعدات؛<لي>
<ب><سبان ليف = "">محاكاة وطبقة النظام البيئي البرمجيات<سبان ليف = "">درجة التوافق عالية. يمكن تحميل بيانات المحاكاة ومهام التدريب إلى السلسلة لتأكيد الحقوق. يمكن أيضًا التحقق من الوكلاء ووحدات المهارات من خلالNFT أو رمز الوكيلتحقيق الرسملة.<لي>
<ب><سبان ليف = "">طبقة المنصة<سبان ليف = "">تظهر شبكات العمل والتعاون اللامركزية أعظم إمكاناتها – يمكن لـ Web3 أن تبني تدريجيًا “سوق عمل آلي” موثوق به من خلال آلية متكاملة للهوية والحوافز والحوكمة، مما يضع النموذج الأولي المؤسسي لاقتصاد الآلة في المستقبل.

<سبان ليف = "">ومن منظور طويل الأمد،التعاون وطبقة النظام الأساسيإنه الاتجاه الأكثر قيمة في تكامل Web3 والروبوتات والذكاء الاصطناعي.ومع اكتساب الروبوتات تدريجيًا لقدرات الإدراك واللغة والتعلم، فإنها تتطور إلى أفراد أذكياء قادرين على اتخاذ القرار المستقل والتعاون وخلق قيمة اقتصادية.لا يزال هؤلاء “العمال الأذكياء” بحاجة إلى عبور أربعة حدود للمشاركة بشكل حقيقي في النظام الاقتصادي.<ب>الهوية والثقة والحوافز والحوكمةالعتبة الأساسية.
- <لي>
<سبان ليف = "">في<ب>طبقة الهوية، يحتاج الجهاز إلى هوية رقمية يمكن تأكيدها وتتبعها.تمريرمن خلال آلة DID،يمكن لكل روبوت أو جهاز استشعار أو طائرة بدون طيار إنشاء “بطاقة هوية” فريدة وقابلة للتحقق على السلسلة، تربط ملكيته وسجلات السلوك ونطاق السلطة لتحقيق التفاعل الآمن وتحديد المسؤوليات.<لي>
<سبان ليف = "">في<ب>طبقة الثقةالمفتاح هو جعل “العمل الآلي” قابلاً للتحقق والقياس والقياسالتسعير.بمساعدة العقود الذكية والأوراكل وآليات التدقيق، جنبًا إلى جنب مع إثبات العمل المادي (PoPW) وبيئة التنفيذ الموثوقة (TEE) ودليل المعرفة الصفرية (ZKP)، يمكن ضمان صحة عملية تنفيذ المهمة وإمكانية تتبعها، مما يجعل سلوك الآلة تجريبيًا.القيمة المحاسبية الاقتصادية<لي>
<سبان ليف = "">في<ب>طبقة الحوافز، يمر Web3نظام حوافز الرمز المميز وتجريد الحساب وقناة الحالةتحقيق التسوية التلقائية ونقل القيمة بين الأجهزة. يمكن للروبوتات إكمال تأجير الطاقة الحاسوبية ومشاركة البيانات من خلال المدفوعات الصغيرة، واستخدام آليات التعهد والجزاء لضمان أداء المهام؛وبمساعدة العقود الذكية والأوراكل، يمكن أيضًا تشكيل “سوق تعاون آلي” لا مركزي لا يتطلب جدولة يدوية.<لي>
<سبان ليف = "">في<ب>الحكم، عندما يتمتع الجهاز بقدرات استقلالية طويلة المدى، يوفر Web3 إطارًا إداريًا شفافًا وقابلاً للبرمجة:استخدم DAO للتحكم في معلمات نظام اتخاذ القرار المشترك، والحفاظ على الأمن والنظام من خلال آليات التوقيع المتعدد والسمعة.وعلى المدى الطويل، سيدفع هذا مجتمع الآلة نحو مرحلة “الحوكمة الخوارزمية” – حيث يحدد البشر الأهداف والحدود، وتستخدم الآلات العقود للحفاظ على الحوافز والتوازن.
<سبان ليف = "">الرؤية النهائية لتكامل Web3 والروبوتات: شبكة تقييم البيئة الحقيقية—— “محرك استدلال في العالم الحقيقي” يتكون من روبوتات موزعة تختبر باستمرار وتقيس قدرات النموذج في سيناريوهات فيزيائية متنوعة ومعقدة؛وسوق العمل الروبوتي—— تؤدي الروبوتات مهامًا واقعية يمكن التحقق منها في جميع أنحاء العالم، وتكسب الأرباح من خلال التسوية على السلسلة، وتعيد استثمار القيمة في قوة الحوسبة أو ترقيات الأجهزة.
<سبان ليف = "">من الناحية العملية، فإن الجمع بين الذكاء المتجسد وWeb3 لا يزال في مرحلة الاستكشاف المبكرة، ويظل اقتصاد الذكاء الآلي اللامركزي أكثر على مستوى السرد والمجتمع. في الواقع، تنعكس اتجاهات الجمع ذات الإمكانات الممكنة بشكل أساسي في الجوانب الثلاثة التالية:
<ب><سبان ليف = "">(1)التعهيد الجماعي للبيانات وتأكيد الحقوق<سبان ليف = ""><ب>—— يشجع Web3 المساهمين على تحميل بيانات العالم الحقيقي من خلال آليات الحوافز والتتبع على السلسلة؛<سبان ليف = "">
<ب><سبان ليف = "">(2)المشاركة العالمية ذات الذيل الطويل<سبان ليف = "">—— تعمل آليات الدفع الصغيرة عبر الحدود وآليات الحوافز الصغيرة على تقليل تكاليف جمع البيانات وتوزيعها بشكل فعال؛<سبان ليف = "">
<ب><سبان ليف = "">(3)التمويل والابتكار التعاوني<سبان ليف = "">—— يمكن لنموذج DAO تعزيز أصول الروبوتات وقسائم الدخل وآلية التسوية بين الآلات.
<سبان ليف = "">بشكل عام، على المدى القصير، التركيز الرئيسي هو علىجمع البيانات وطبقة الحوافزومن المتوقع على المدى المتوسط أن يكون في “الدفع بعملة مستقرة + تجميع البيانات طويلة الأمد“وطبقة الأصول والتسوية RaaSتحقيق اختراقات. على المدى الطويل، إذا انتشرت الروبوتات البشرية على نطاق واسع،قد يصبح Web3 النظام الأساسي لملكية الآلة وتوزيع الإيرادات والحوكمة، لتعزيز تشكيل اقتصاد الآلة اللامركزي حقًا.
<ب><سبان ليف = "">خريطة بيئية لروبوت Web3 وحالات مختارة
<سبان ليف = "">واستنادًا إلى المعايير الثلاثة المتمثلة في “التقدم الذي يمكن التحقق منه، والانفتاح التكنولوجي، وأهمية الصناعة”، قم بفرز التيارويب 3 × الروبوتاتالمشاريع التمثيلية، المصنفة حسب الهيكل المكون من خمس طبقات:طبقة الذكاء النموذجي، والطبقة الاقتصادية للآلة، وطبقة جمع البيانات، والطبقة الأساسية للإدراك والمحاكاة، وطبقة دخل أصول الروبوت.لكي نبقى موضوعيين، قمنا بإزالة “النقاط الساخنة” الواضحة أو العناصر التي لا تحتوي على معلومات كافية؛ إذا كان هناك أي سهو، يرجى تصحيح لنا.

<ب><سبان ليف = "">نموذج وأمبير. الذكاء
<ب><سبان ليف = "">#<ب><سبان ليف = "">Openmind – بناء أندرويد للروبوتات
<سبان ليف = "">أوبن مايندوهو نظام تشغيل مفتوح المصدر (Robot OS) للذكاء المتجسد (Embodied AI) والتحكم في الروبوت. الهدف هو بناء أول بيئة تشغيل روبوت لامركزية ومنصة تطوير في العالم.يتكون جوهر المشروع من عنصرين رئيسيين:
- <لي>
<سبان ليف = "">OM1: طبقة تشغيل ذكاء اصطناعي معيارية مفتوحة المصدر مبنية على ROS2، تُستخدم لتنسيق الإدراك والتخطيط وخطوط العمل، لخدمة الروبوتات الرقمية والمادية؛<لي>
<سبان ليف = "">قماش: طبقة التنسيق الموزعة (طبقة التنسيق النسيجية) تربط قوة الحوسبة السحابية والنماذج والروبوتات الحقيقية، مما يسمح للمطورين بالتحكم في الروبوتات وتدريبها في بيئة موحدة.
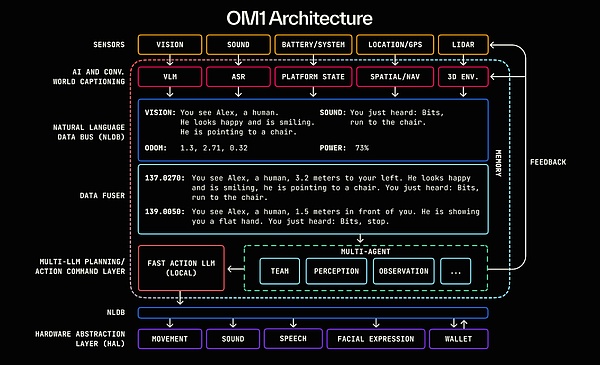
<سبان ليف = "">في جوهره، يعد OpenMind بمثابةطبقة وسطى ذكية بين LLM (نموذج اللغة الكبير) وعالم الروبوتات، مما يسمح للذكاء اللغوي بالتحول حقًا إلى ذكاء متجسد (Ebodied Intelligence)، بناءً علىالفهم (اللغة ← الإجراء)يصلالمحاذاة (البلوكشين → القواعد)هيكل عظمي ذكي.
<سبان ليف = "">يحقق نظام OpenMind متعدد الطبقات حلقة مغلقة تعاونية كاملة: يمر البشريوفر تطبيق OpenMind التعليقات والتعليقات التوضيحية (بيانات RLHF)، وتكون Fabric Network مسؤولة عن ذلكالمصادقة وتوزيع المهام وبروتوكولات التسويةلحن، OM1 Robots ينفذ المهمةالخدمات واتباع “دستور الروبوت” على blockchain لإكمال عمليات التدقيق السلوكي والمدفوعات، وبالتالي تحقيق ذلكردود الفعل البشرية ← التعاون في المهام ← التسوية على السلسلةشبكة تعاون الآلة اللامركزية.

<سبان ليف = "">تقدم المشروع والتقييم الواقعي
<سبان ليف = "">إن OpenMind في مرحلة مبكرة من “التشغيل التكنولوجي ولكنه غير متوفر تجاريًا”. النظام الأساسيلقد أصبح OM1 Runtime مفتوح المصدر على GitHub.يمكن تشغيله على منصات متعددة ويدعم الإدخال متعدد الوسائط. إنه يحقق فهم مهمة تحويل اللغة إلى إجراء من خلال ناقل بيانات اللغة الطبيعية (NLDB). إنها تتمتع بأصالة عالية ولكنها لا تزال تجريبية. شبكة النسيج وسلسلةالتسوية تكمل فقط تصميم طبقة الواجهة.
<سبان ليف = "">بيئيا، المشروع لديهأجهزة مفتوحة مثل Unitree وUbtech وTurtleBot وStanford وOxford وSeol Roboticsويستخدم التعاون مع الجامعات الأخرى بشكل أساسي في التحقق من التعليم والبحث، ولم يتم تصنيعه بعد.التطبيق الآن في مرحلة تجريبية، لكن ميزات الحوافز والمهام لا تزال في مراحلها الأولى.
<سبان ليف = "">فيما يتعلق بنموذج الأعمال، فقد تم بناء OpenMindOM1 (نظام مفتوح المصدر) + Fabric (بروتوكول التسوية) + Skill Marketplace (طبقة الحوافز)لا يوجد لدى النظام البيئي المكون من ثلاثة مستويات حاليًا أي إيرادات ويعتمد على ما يقرب من20 مليون دولار في التمويل المبكر(بانتيرا، كوين بيس فنتشرز، دي سي جي).بشكل عام، التكنولوجيا رائدة، لكن التسويق التجاري والبيئة لا يزالان في بداياتهما.وإذا تم تنفيذ فابريك بنجاح، فمن المتوقع أن يصبح “أندرويد في عصر الذكاء المتجسد”، لكن له دورة طويلة ومخاطر عالية واعتماد قوي على الأجهزة.
<ب><سبان ليف = "">#<ب><سبان ليف = "">CodecFlow – محرك التنفيذ للروبوتات
<سبان ليف = "">CodecFlow هو بروتوكول طبقة تنفيذ لامركزي (Fabric) يعتمد على شبكة Solana. ويهدف إلى توفير بيئة تشغيل حسب الطلب لعملاء الذكاء الاصطناعي وأنظمة الروبوتات، مما يسمح لكل وكيل بالحصول على “آلة فورية”.يتكون جوهر المشروع من ثلاث وحدات:
- <لي>
<سبان ليف = "">قماش: يمكن لطبقة تجميع طاقة الحوسبة عبر السحابة (Weaver + Shuttle + Gauge) إنشاء أجهزة افتراضية آمنة أو حاويات GPU أو عقد تحكم روبوتية لمهام الذكاء الاصطناعي في ثوانٍ؛<لي>
<سبان ليف = "">أوبتر SDK: إطار تنفيذ الوكيل (واجهة بايثون)، المستخدم لإنشاء “عملاء” يمكنهم تشغيل سطح المكتب أو المحاكاة أو الروبوتات الحقيقية؛<لي>
<سبان ليف = "">الحوافز الرمزية: تعمل طبقة الحوافز والدفع على السلسلة على ربط موفري خدمات الحوسبة ومطوري الوكلاء ومستخدمي المهام الآلية لتشكيل قوة حوسبة لا مركزية وسوق مهام.
<سبان ليف = "">الهدف الأساسي لـ CodecFlow هو إنشاء “قاعدة تنفيذ لا مركزية لمشغلي الذكاء الاصطناعي والروبوتات” بحيث يمكن لأي وكيل العمل بأمان في أي بيئة (Windows/Linux/ROS/MuJoCo/وحدة تحكم الروبوت) لتحقيق كل شيء بدءًا منجدولة الطاقة الحاسوبية(قماش) →بيئة النظام(طبقة النظام) →الإدراك والعمل(مشغل VLA) بنية التنفيذ الشائعة.
<سبان ليف = "">تقدم المشروع والتقييم الواقعي
<سبان ليف = "">لقد تم إصدار نسخة سابقةإطار النسيج(اذهب) معأوبتر SDK(Python)، يمكنك بدء مثيل حوسبة معزول في صفحة ويب أو بيئة سطر الأوامر. من المتوقع إطلاق سوق المشغلين في نهاية عام 2025 ويتم وضعه كطبقة تنفيذ لا مركزية لقوة حوسبة الذكاء الاصطناعي.تشمل أهداف الخدمة الرئيسية مطوري الذكاء الاصطناعي وفرق أبحاث الروبوتات وشركات التشغيل الآلي.

<ب><سبان ليف = "">طبقة اقتصاد الآلة
<ب><سبان ليف = "">#<ب><سبان ليف = "">BitRobot – مختبر الروبوتات المفتوح في العالم
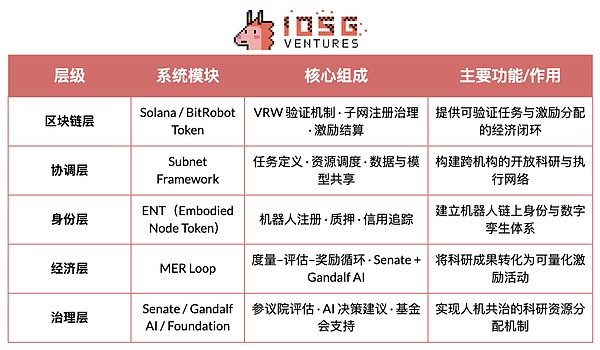
<سبان ليف = "">BitRobot هو برنامج تم تطويره للذكاء الاصطناعي المتجسد والروبوتات.شبكة البحث العلمي والتعاون اللامركزية(Open Robotics Lab)، تم إطلاقه بشكل مشترك بين FrodoBots Labs وProtocol Labs. رؤيتها الأساسية هي:من خلال البنية المفتوحة لـ “الشبكات الفرعية + آلية الحوافز + العمل الذي يمكن التحقق منه (VRW)”، تشمل الوظائف الأساسية ما يلي:
- <لي>
<سبان ليف = "">تحديد المساهمة الحقيقية لكل مهمة روبوت والتحقق منها من خلال معايير VRW (العمل الآلي القابل للتحقق)؛<لي>
<سبان ليف = "">منح الروبوتات هوية على السلسلة ومسؤولية اقتصادية من خلال ENT (Embodied Node Token)؛<لي>
<سبان ليف = "">تنظيم التعاون عبر الإقليمي بين البحث العلمي، والقدرة الحاسوبية، والمعدات والمشغلين من خلال الشبكات الفرعية؛<لي>
<سبان ليف = "">من خلال مجلس الشيوخ + غاندالف للذكاء الاصطناعي، يمكننا تحقيق عملية صنع القرار التحفيزية وإدارة البحث العلمي لـ “الحوكمة المشتركة بين الإنسان والآلة”.
<سبان ليف = "">منذ إصدار المستند التقني في عام 2025، قامت BitRobot بتشغيل شبكات فرعية متعددة (مثل SN/01 ET Fugi وSN/05 SeeSaw بواسطة Virtuals Protocol) لتحقيق التحكم اللامركزي عن بعد وجمع بيانات السيناريو الحقيقي، وأطلقت صندوق التحديات الكبرى بقيمة 5 ملايين دولار لتعزيز مسابقات البحث العلمي في تطوير النماذج العالمية.
<ب><سبان ليف = "">#<ب><سبان ليف = "">الذروة – اقتصاد الأشياء
<سبان ليف = "">Peaq عبارة عن blockchain من الطبقة الأولى تم تصميمه خصيصًا لاقتصاد الآلة، مما يوفر القدرات الأساسية مثل هوية الآلة والمحافظ الموجودة على السلسلة والتحكم في الوصول ومزامنة الوقت على مستوى النانو ثانية (توقيت الآلة العالمي) لملايين الروبوتات والأجهزة.تتيح مجموعة Robotics SDK الخاصة بها للمطورين جعل الروبوتات “جاهزة لاقتصاد الآلة” مع الحد الأدنى من التعليمات البرمجية، مما يتيح إمكانية التشغيل البيني والتفاعل بين البائعين والأنظمة.
<سبان ليف = "">حاليًا، أطلقت Peaq أول مزرعة روبوتات رمزية في العالم وتدعم أكثر من 60 تطبيقًا آليًا في العالم الحقيقي. يساعد إطار عمل الترميز الخاص بها شركات الروبوتات على جمع رأس المال للأجهزة كثيفة رأس المال وتوسيع المشاركة من B2B/B2C التقليدية إلى طبقة مجتمعية أوسع.ومن خلال مجموعة الحوافز على مستوى البروتوكول التي يتم ضخها من خلال رسوم الشبكة، يمكن لـ Peaq دعم الوصول إلى الأجهزة الجديدة ودعم المطورين، وتشكيل دولاب الموازنة الاقتصادي الذي يدفع التوسع المتسارع في مشاريع الذكاء الاصطناعي في مجال الروبوتات والفيزياء.

<ب><سبان ليف = "">طبقة البيانات
<سبان ليف = "">تهدف إلى حل مشكلة بيانات العالم الحقيقي النادرة والمكلفة وعالية الجودة في التدريب على الذكاء المتجسد.جمع وإنشاء بيانات التفاعل بين الإنسان والحاسوب من خلال مسارات متعددة، بما في ذلك التحكم عن بعد (PrismaX، BitRobot Network)، ومنظور الشخص الأول والتقاط الحركة (Mecka، BitRobot Network، Sapien، Vader، NRN)، والبيانات الاصطناعية والمحاكاة (BitRobot Network)، مما يوفر أساس تدريب قابل للتطوير والتعميم لنماذج الروبوت.
<سبان ليف = "">ما يجب أن يكون واضحا هو، Web3 ليس جيدًا في “إنتاج البيانات”—— فيما يتعلق بالأجهزة والخوارزمية وكفاءة التجميع، فإن عملاق Web2 يتجاوز بكثير أي مشروع DePIN.قيمته الحقيقية تكمن فيإعادة تشكيل آلية توزيع البيانات وتحفيزها. استنادًا إلى “شبكة الدفع بالعملة المستقرة + نموذج التعهيد الجماعي”ومن خلال نظام حوافز غير مصرح به وآلية تأكيد الحقوق على السلسلة، يتم تحقيق تسوية منخفضة التكلفة للمبالغ الصغيرة وإمكانية تتبع المساهمة وتقاسم الأرباح تلقائيًا.ومع ذلك، لا يزال التعهيد الجماعي المفتوح يواجه مشكلة الحلقة المغلقة بين الجودة والطلب – جودة البيانات غير متساوية، وهناك نقص في التحقق الفعال والمشترين المستقرين.
<ب><سبان ليف = "">#<ب><سبان ليف = "">بريزماكس
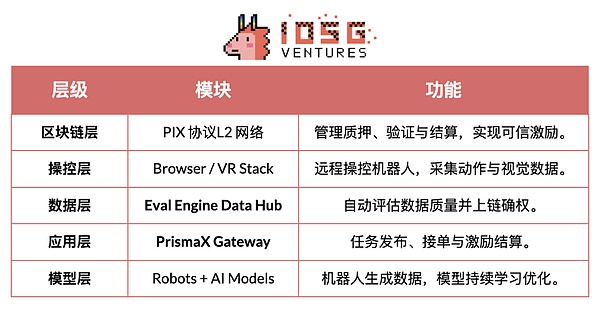
<سبان ليف = "">PrismaX عبارة عن شبكة لا مركزية للتحكم عن بعد وشبكة اقتصادية للبيانات للذكاء المتجسد (Embodied AI). ويهدف إلى بناء “سوق عمل عالمي للروبوتات” والسماح للمشغلين البشريين والمعدات الروبوتية ونماذج الذكاء الاصطناعي بالتطور المشترك من خلال نظام الحوافز على السلسلة.يتكون جوهر المشروع من عنصرين رئيسيين:
- <لي>
<سبان ليف = "">مكدس التشغيل عن بعد—— نظام التحكم عن بعد (المتصفح/واجهة الواقع الافتراضي + SDK)، الذي يربط الأذرع الآلية العالمية وروبوتات الخدمة لتحقيق التحكم البشري وجمع البيانات في الوقت الفعلي؛<لي>
<سبان ليف = "">محرك إيفال—— محرك تقييم البيانات والتحقق منها (CLIP + DINOv2 + التسجيل الدلالي للتدفق البصري)، الذي يولد درجات الجودة لكل مسار عملية ويحملها إلى السلسلة للتسوية.
<سبان ليف = "">تقوم PrismaX بتحويل سلوك التشغيل البشري إلى بيانات تعلم الآلة من خلال آلية حوافز لا مركزية لبناءجهاز التحكم عن بعد ← جمع البيانات ← تدريب النماذج ← التسوية على السلسلةحلقة مغلقة كاملة لتحقيق اقتصاد دائري تكون فيه “العمالة البشرية هي أصل البيانات”.
<سبان ليف = "">تقدم المشروع والتقييم الواقعي
<سبان ليف = "">أطلقت PrismaX إصدارًا تجريبيًا (gateway.prismax.ai) في أغسطس 2025. ويمكن للمستخدمين التحكم عن بعد في الذراع الآلية لإجراء تجارب استيعاب وإنشاء بيانات التدريب. محرك Eval قيد التشغيل داخليًا بالفعل.بشكل عام، تتمتع تقنية PrismaX بدرجة عالية من التنفيذ وتحديد المواقع بوضوح.إنها الطبقة الوسطى الرئيسية التي تربط “العملية البشرية × نموذج الذكاء الاصطناعي × تسوية blockchain”.ومن المتوقع أن تصبح إمكاناته على المدى الطويل “بروتوكولًا لا مركزيًا للعمل والبيانات في عصر الذكاء المتجسد”، لكنه لا يزال يواجه تحديات واسعة النطاق على المدى القصير.
<ب><سبان ليف = "">#<ب><سبان ليف = "">شبكة بيتروبوت
<سبان ليف = "">تقوم شبكة BitRobot بجمع البيانات متعددة المصادر مثل الفيديو والتحكم عن بعد والمحاكاة من خلال شبكتها الفرعية.يتيح SN/01 ET Fugi للمستخدمين التحكم عن بعد في الروبوت لإكمال المهام وجمع بيانات الملاحة والإدراك في تفاعل “واقعي على طراز Pokémon Go”.أدت طريقة اللعب هذه إلى إنشاء مجموعة بيانات FrodoBots-2K، وهي واحدة من أكبر مجموعات البيانات مفتوحة المصدر للملاحة بين الإنسان والآلة والتي تستخدمها حاليًا مؤسسات مثل UC Berkeley RAIL وGoogle DeepMind.يستخدم SN/05 SeeSaw (البروتوكول الافتراضي) جهاز iPhone لجمع بيانات الفيديو من منظور الشخص الأول من خلال التعهيد الجماعي على نطاق واسع في بيئات حقيقية.وتركز الشبكات الفرعية الأخرى المعلن عنها، مثل RoboCap وRayvo، على جمع بيانات الفيديو من منظور الشخص الأول باستخدام أجهزة مادية منخفضة التكلفة.
<ب><سبان ليف = "">#<ب><سبان ليف = "">مكة
<سبان ليف = "">Mecka هي شركة بيانات روبوتية تستخدم مجموعة من الهواتف المحمولة وأجهزة مخصصة للتعهيد الجماعي لمقاطع الفيديو من منظور الشخص الأول وبيانات الحركة البشرية وعروض المهام لبناء مجموعات بيانات متعددة الوسائط واسعة النطاق ودعم تدريب نماذج الذكاء المجسدة.
<ب><سبان ليف = "">#<ب><سبان ليف = "">العاقل
<سبان ليف = "">Sapien عبارة عن منصة التعهيد الجماعي مع “ذكاء الروبوت المبني على بيانات الحركة البشرية” في جوهرها. فهو يجمع بيانات الحركة البشرية والوضعية والتفاعل من خلال الأجهزة القابلة للارتداء وتطبيقات الهاتف المحمول لتدريب نماذج الذكاء المجسدة.ويلتزم المشروع ببناء أكبر شبكة بيانات لحركة الإنسان في العالم، مما يجعل السلوك البشري الطبيعي مصدرًا أساسيًا للبيانات لتعلم الروبوت وتعميمه.
<ب><سبان ليف = "">#<ب><سبان ليف = "">فيدر
<سبان ليف = "">يقوم Vader بالاستعانة بمصادر جماعية لمقاطع الفيديو وعروض المهام من منظور الشخص الأول من خلال تطبيق MMO الواقعي EgoPlay: يقوم المستخدمون بتسجيل الأنشطة اليومية من منظور الشخص الأول ويتم مكافأتهم بمبلغ VADER دولار.يمكن لخط بيانات ORN الخاص به تحويل صور POV الأصلية إلى مجموعات بيانات منظمة تتم معالجتها بالخصوصية، بما في ذلك تسميات الإجراءات والسرد الدلالي، والتي يمكن استخدامها مباشرة للتدريب على إستراتيجية الروبوتات البشرية.
<ب><سبان ليف = "">#<ب><سبان ليف = "">وكلاء NRN
<سبان ليف = "">منصة بيانات RL مجسدة تعمل على توفير البيانات التوضيحية البشرية من خلال التحكم في الروبوت من جانب المتصفح ومسابقات المحاكاة.تولد NRN مسارات سلوكية طويلة الذيل من خلال المهام “التنافسية”، والتي تُستخدم للتعلم بالتقليد والتعلم المعزز المستمر، وتكون بمثابة بيانات أولية قابلة للتطوير لدعم التدريب على السياسات الواقعية.
<ب><سبان ليف = "">#<ب><سبان ليف = "">مقارنة مشروع طبقة جمع البيانات الذكية المجسدة

<ب><سبان ليف = "">الإدراك والمحاكاة (البرامج الوسيطة والمحاكاة)
<سبان ليف = "">توفر طبقة الإدراك والمحاكاة البنية التحتية الأساسية للروبوتات لربط العالم المادي واتخاذ القرارات الذكية، بما في ذلك تحديد المواقع والاتصالات والنمذجة المكانية والتدريب على المحاكاة وغيرها من القدرات. إنه “الهيكل العظمي للطبقة الوسطى” لبناء أنظمة ذكية مجسدة واسعة النطاق. حاليا، هذا المجال لا يزال في مرحلة الاستكشاف المبكر.وقد شكل كل مشروع تخطيطًا مختلفًا في اتجاهات تحديد المواقع عالية الدقة، وحوسبة الفضاء المشتركة، وتوحيد البروتوكول، والمحاكاة الموزعة.لا يوجد معيار موحد أو نظام بيئي قابل للتشغيل البيني حتى الآن.
<سبان ليف = "">الوسيطة & الأشعة تحت الحمراء المكانية
<سبان ليف = "">تشكل القدرات الأساسية للروبوتات – الملاحة وتحديد المواقع والاتصال والنمذجة المكانية – جسرًا رئيسيًا بين العالم المادي وصنع القرار الذكي.في حين أن مشاريع DePIN الأوسع (Silencio، WeatherXM، DIMO) بدأت تشير إلى “الروبوتات”، فإن المشاريع التالية ترتبط بشكل مباشر بالذكاء المتجسد.
<ب><سبان ليف = "">#<ب><سبان ليف = "">RoboStack – مكدس تشغيل الروبوت السحابي الأصلي
<سبان ليف = "">RoboStack عبارة عن برنامج وسيط للروبوتات السحابية الأصلية يحقق الجدولة في الوقت الفعلي والتحكم عن بعد وقابلية التشغيل البيني عبر الأنظمة الأساسية لمهام الروبوت من خلال RCP (بروتوكول سياق الروبوت)، ويوفر محاكاة سحابية وتنسيق سير العمل وقدرات الوصول إلى الوكيل.
<ب><سبان ليف = "">#<ب><سبان ليف = "">GEODNET – شبكة GNSS اللامركزية
<سبان ليف = "">GEODNET هي شبكة GNSS لامركزية عالمية توفر تحديد المواقع بدقة عالية على مستوى السنتيمتر RTK. ومن خلال المحطات الأساسية الموزعة والحوافز على السلسلة، توفر “طبقة مرجعية جغرافية” في الوقت الفعلي للطائرات بدون طيار والقيادة الذاتية والروبوتات.
<ب><سبان ليف = "">#<ب><سبان ليف = "">أوكي – Posemesh للحوسبة المكانية
<سبان ليف = "">قامت Auki ببناء شبكة Posemesh للحوسبة المكانية اللامركزية التي تولد خرائط بيئة ثلاثية الأبعاد في الوقت الفعلي من خلال أجهزة استشعار التعهيد الجماعي وعقد الحوسبة، مما يوفر معيارًا مكانيًا مشتركًا للواقع المعزز والملاحة الآلية والتعاون متعدد الأجهزة. إنها البنية التحتية الرئيسية التي تربط الفضاء الافتراضي بالمشاهد الحقيقية، مما يعزز تكامل AR × Robotics.
<ب><سبان ليف = "">#<ب><سبان ليف = "">Tashi Network — شبكة تعاون شبكية في الوقت الفعلي للروبوتات
<سبان ليف = "">شبكة شبكية لا مركزية في الوقت الفعلي لتحقيق إجماع أقل من 30 مللي ثانية، وتبادل أجهزة الاستشعار ذات زمن الوصول المنخفض، ومزامنة حالة الروبوتات المتعددة.تدعم MeshNet SDK الخاصة بها SLAM المشتركة والتعاون الجماعي وتحديثات الخرائط القوية، مما يوفر طبقة تعاون عالية الأداء في الوقت الفعلي للذكاء الاصطناعي المتجسد.
<ب><سبان ليف = "">#<ب><سبان ليف = "">Staex — شبكة اتصال وقياس عن بعد لا مركزية
<سبان ليف = "">توفر طبقة الاتصال اللامركزية الناشئة عن ذراع البحث والتطوير التابع لشركة Deutsche Telekom اتصالات آمنة وقياسًا موثوقًا به وقدرات التوجيه من الجهاز إلى السحابة، مما يتيح لأساطيل الروبوتات تبادل البيانات بشكل موثوق والتعاون عبر مختلف المشغلين.
<ب><سبان ليف = "">نظام المحاكاة والتدريب (المحاكاة الموزعة والتعلم)
<ب><سبان ليف = "">#<ب><سبان ليف = "">التدرج – نحو الذكاء المفتوح
<سبان ليف = "">Gradient هو مختبر للذكاء الاصطناعي يبني “الذكاء المفتوح” ويلتزم بتحقيق التدريب الموزع والاستدلال والتحقق والمحاكاة على أساس البنية التحتية اللامركزية؛ تشتمل مجموعتها التكنولوجية الحالية على Parallax (الاستدلال الموزع)، وEcho (التعلم المعزز الموزع والتدريب متعدد الوكلاء)، وGradient Cloud (حلول الذكاء الاصطناعي للمؤسسات). وفي مجال الروبوتات، توفر منصة ميراج محاكاة موزعة وبيئة تفاعلية ديناميكية وقدرات تعلم موازية واسعة النطاق للتدريب على الذكاء المتجسد لتسريع تدريب النماذج العالمية والاستراتيجيات العامة.تستكشف شركة Mirage التعاون المحتمل مع NVIDIA على محرك Newton الخاص بها.
<ب><سبان ليف = "">طبقة دخل أصول الروبوت (RobotFi/RWAiFi)
<سبان ليف = "">تركز هذه الطبقة على الرابط الرئيسي لتحويل الروبوتات من “أدوات إنتاجية” إلى “أصول مالية” وبناء البنية التحتية المالية لاقتصاد الآلة من خلال ترميز الأصول وتوزيع الدخل والحوكمة اللامركزية.تشمل المشاريع التمثيلية ما يلي:
<ب><سبان ليف = "">#<ب><سبان ليف = "">XmaquinaDAO – داو الذكاء الاصطناعي الفيزيائي
<سبان ليف = "">XMAQUINA هو نظام بيئي لامركزي يوفر للمستخدمين العالميين قنوات مشاركة عالية السيولة لأفضل الروبوتات البشرية وشركات الاستخبارات المجسدة، مما يوفر الفرص التي كانت في الأصل متاحة فقط لمؤسسات رأس المال الاستثماري في السلسلة.رمزها DEUS هو أصل مؤشر سائل وحامل حوكمة، يستخدم لتنسيق تخصيص الخزانة والتنمية البيئية.من خلال بوابة DAO ومنصة إطلاق الاقتصاد الآلي، يمكن للمجتمع أن يعقد ويدعم بشكل مشترك مشاريع الذكاء الاصطناعي المادي الناشئة من خلال ترميز أصول الآلة والمشاركة المنظمة على السلسلة.
<ب><سبان ليف = "">#<ب><سبان ليف = "">GAIB – الطبقة الاقتصادية للبنية التحتية للذكاء الاصطناعي
<سبان ليف = "">يلتزم GAIB بتوفير طبقة اقتصادية موحدة للبنية التحتية المادية للذكاء الاصطناعي مثل وحدات معالجة الرسومات والروبوتات، وربط رأس المال اللامركزي بأصول البنية التحتية الحقيقية للذكاء الاصطناعي، وبناء نظام اقتصادي ذكي يمكن التحقق منه وقابل للتركيب ومربح.
<سبان ليف = "">في اتجاه الروبوتات، لا يقوم GAIB “ببيع الرموز الروبوتية”، ولكنه يحقق تحويل “التدفق النقدي الحقيقي ← أصول الدخل القابلة للتركيب على السلسلة” من خلال تمويل معدات الروبوت وعقود التشغيل (RaaS، وجمع البيانات، والتشغيل عن بعد، وما إلى ذلك) على السلسلة.يغطي هذا النظام تمويل الأجهزة (الإيجار المالي/التعهد)، والتدفق النقدي التشغيلي (RaaS/خدمة البيانات) وإيرادات تدفق البيانات (الترخيص/العقد)، وما إلى ذلك، مما يجعل أصول الروبوت وتدفقها النقدي قابلة للقياس وتسعيرها وقابلة للتداول.
<سبان ليف = "">يستخدم GAIB AID/sAID كحامل تسوية ودخل، ويضمن عوائد مستقرة من خلال آليات منظمة للتحكم في المخاطر (الإفراط في الضمانات والاحتياطيات والتأمين)، ويتمتع بإمكانية الوصول على المدى الطويل إلى مشتقات DeFi وأسواق السيولة، مما يشكل حلقة مالية مغلقة من “أصول الروبوت” إلى “أصول الدخل القابلة للدمج”.الهدف هو أن نصبح العمود الفقري الاقتصادي للذكاء في عصر الذكاء الاصطناعي
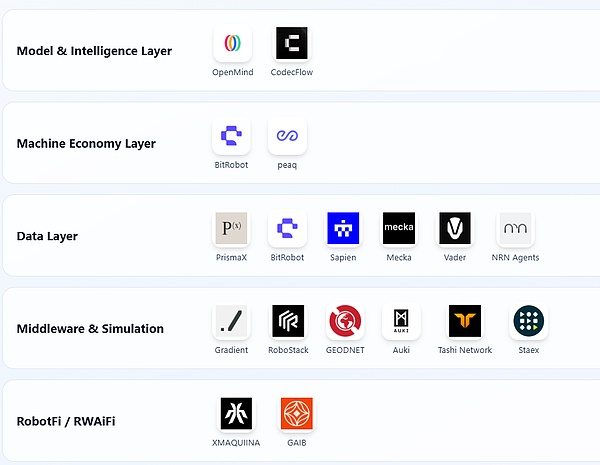
خريطة بيئية للروبوت Web3
<ب><سبان ليف = "">ملخص وتوقعات: تحديات واقعية وفرص طويلة المدى
<سبان ليف = "">ومن منظور طويل الأمد،روبوت × الذكاء الاصطناعي × ويب 3يهدف التكامل إلى بناء نظام اقتصادي للآلة لامركزي (DeRobot Economy) وتعزيز الذكاء المتجسد من “أتمتة الآلة الواحدة” إلى التعاون الشبكي مع “الحقوق المؤكدة والقابلة للتسوية والحوكمة”. منطقها الأساسي هو من خلال “Tالرمز المميز → النشر → البيانات → إعادة توزيع القيمة“يتم تشكيل آلية تعميم ذاتي لتمكين الروبوتات وأجهزة الاستشعار وعقد الطاقة الحاسوبية من تأكيد الحقوق والتجارة ومشاركة الأرباح.
<سبان ليف = "">ومع ذلك، من الناحية العملية، لا يزال هذا النموذج في المرحلة الاستكشافية المبكرة ولا يزال بعيدًا عن تشكيل تدفق نقدي مستقر وحلقة تجارية مغلقة واسعة النطاق.وتظل معظم المشاريع على المستوى السردي، مع نشر فعلي محدود. إن تصنيع الروبوتات وتشغيلها وصيانتها هي صناعات كثيفة رأس المال، ولا يمكن للحوافز الرمزية وحدها أن تدعم توسيع البنية التحتية.على الرغم من أن التصميم المالي على السلسلة قابل للتركيب، إلا أنه لم يحل بعد مشكلة تسعير المخاطر وتحقيق العائد للأصول الحقيقية.لذلك، فإن ما يسمى بـ “التداول الذاتي لشبكة الآلة” لا يزال مثاليًا، ويجب التحقق من نموذج أعماله في الواقع.
- <لي>
<ب><سبان ليف = "">طبقة الذكاء النموذجية<سبان ليف = "">(النموذج وطبقة الذكاء) هو حاليًا الاتجاه ذو القيمة الأطول أجلاً.تحاول أنظمة تشغيل الروبوتات مفتوحة المصدر التي يمثلها OpenMind كسر النظام البيئي المغلق وتوحيد التعاون بين الروبوتات المتعددة وواجهات تحويل اللغة إلى إجراء.رؤيتها الفنية واضحة والنظام مكتمل، لكن حجم المشروع ضخم ودورة التحقق طويلة، ولم تشكل بعد ردود فعل إيجابية على المستوى الصناعي.<لي>
<ب><سبان ليف = "">طبقة اقتصاد الآلة<سبان ليف = "">(طبقة اقتصاد الآلة) لا تزال في المرحلة الأولية. في الواقع، عدد الروبوتات محدود، ومن الصعب على هوية اضطراب الشخصية الانفصامية وشبكة الحوافز تشكيل دورة متسقة ذاتيًا.ما زلنا بعيدين عن “اقتصاد العمل الآلي”.في المستقبل، فقط عندما يتم نشر الذكاء المتجسد على نطاق واسع، سوف تظهر التأثيرات الاقتصادية لشبكات الهوية والتسوية والتعاون على السلسلة حقًا.<لي>
<ب><سبان ليف = "">طبقة جمع البيانات<سبان ليف = "">(طبقة البيانات) تتمتع طبقة جمع البيانات بأدنى حد، ولكنها حاليًا الأقرب إلى الجدوى التجارية.يتطلب جمع البيانات الذكية المجسدة استمرارية مكانية زمانية عالية للغاية ودقة دلالية للعمل، والتي تحدد جودتها وقابلية إعادة استخدامها.تعد كيفية تحقيق التوازن بين “حجم التعهيد الجماعي” و”موثوقية البيانات” تحديًا أساسيًا في الصناعة.يستهدف PrismaX أولاً احتياجات الجانب B، ثم يوزع مجموعة المهام والتحقق لتوفير قوالب قابلة للتكرار إلى حد معين، لكن النطاق البيئي ومعاملات البيانات لا تزال تتطلب وقتًا للتراكم.<لي>
<ب><سبان ليف = "">طبقة الإدراك والمحاكاة<سبان ليف = "">(طبقة البرمجيات الوسيطة والمحاكاة) لا تزال في فترة التحقق الفني وتفتقر إلى معايير وواجهات موحدة لتشكيل نظام بيئي قابل للتشغيل البيني.من الصعب توحيد نتائج المحاكاة ونقلها إلى البيئة الحقيقية، وكفاءة Sim2Real محدودة.<لي>
<ب><سبان ليف = "">طبقة دخل الأصول<سبان ليف = "">(RobotFi / RWAiFi) يلعب Web3 بشكل أساسي دورًا مساعدًا في تمويل سلسلة التوريد وتأجير المعدات وإدارة الاستثمار، وتحسين الشفافية وكفاءة التسوية، بدلاً من إعادة تشكيل المنطق الصناعي.
<سبان ليف = "">وبطبيعة الحال، نعتقد أن تقاطع الروبوتات × الذكاء الاصطناعي × ويب 3 لا يزال يمثل أصل الجيل القادم من الأنظمة الاقتصادية الذكية.إنه ليس مجرد مزيج من النماذج التقنية، بل إنه أيضا فرصة لإعادة بناء علاقات الإنتاج: فعندما تمتلك الآلات هويات وحوافز وآليات حوكمة، فإن التعاون بين الإنسان والآلة سوف ينتقل من الأتمتة الجزئية إلى الاستقلال الذاتي الشبكي.على المدى القصير، لا يزال السرد والتجريب يهيمن على هذا الاتجاه، لكن الإطار المؤسسي والتحفيزي الذي وضعه يضع الأساس للنظام الاقتصادي لمجتمع الآلة المستقبلي.ومن منظور طويل المدى، فإن الجمع بين الذكاء المتجسد وشبكة الويب 3 سيعيد تشكيل حدود خلق القيمة، مما يجعل الوكلاء الأذكياء كيانات اقتصادية متعاونة ومربحة ويمكن التعرف عليها حقًا.