Autor: Jacob Zhao @IOSG
Panorama de los robots: de la automatización industrial a la inteligencia humanoide
La cadena tradicional de la industria de robots ha formado un sistema completo en capas de abajo hacia arriba, cubriendoComponentes principales—sistema de control intermedio—fabricación completa de máquinas—integración de aplicacionesCuatro vínculos principales.Componentes principales(Controlador, servo, reductor, sensor, batería, etc.) La barrera técnica es la más alta, lo que determina el límite inferior del rendimiento y costo general de la máquina;sistema de controlEs el “cerebro y cerebelo” del robot, responsable de la toma de decisiones, la planificación y el control de movimientos;Fabricación de máquinas completas.Reflejar las capacidades de integración de la cadena de suministro.Integración y aplicación del sistema.Determinar la profundidad de la comercialización se está convirtiendo en el nuevo núcleo de valor.
Según los escenarios y formas de aplicación, los robots globales siguen el «Automatización industrial → Inteligencia de escenarios → Inteligencia general«La evolución del camino ha formado cinco tipos principales:Robots industriales, robots móviles, robots de servicios, robots especiales y robots humanoides
#robots industriales(Robots industriales)
Actualmente es la única vía completa y madura, y se utiliza ampliamente en procesos de fabricación como soldadura, montaje, pulverización y manipulación.La industria ha formado un sistema de cadena de suministro estandarizado, con un margen de beneficio bruto estable y un claro retorno de la inversión.Una de las subcategorías, los robots colaborativos (Cobots), hace hincapié en la colaboración entre humanos y máquinas, es ligera y fácil de implementar, y es la que está creciendo más rápidamente.
Empresa representativa:ABB, Fanuc, Yaskawa, KUKA, Universal Robots, Jieka, Aobo.
#robot movil(Robots móviles)
Incluyendo AGV (vehículo guiado automáticamente) y AMR (robot móvil autónomo), se han implementado a gran escala en el almacenamiento logístico, la distribución del comercio electrónico y el transporte de fabricación, y se han convertido en las categorías más maduras del lado B.
Empresa representativa: Amazon Robotics, Geek+, Quicktron, Locus Robotics.
#robot de servicio(Robots de servicio)
Dirigida a industrias como la limpieza, la restauración, la hotelería y la educación, es el área de más rápido crecimiento en el lado del consumidor.Los productos de limpieza han entrado en la lógica de la electrónica de consumo y la distribución médica y comercial está acelerando su comercialización. Además, están surgiendo varios robots operativos de uso más general (como el sistema de doble brazo de Dyna), más flexibles que los productos para tareas específicas, pero aún no tan versátiles como los robots humanoides.
Empresa representativa: Ecovacs, Tecnología Roborock, Tecnología Pudu, Inteligencia Qinglang, iRobot, Dyna, etc.
#robot especial
Atiende principalmente escenarios como atención médica, industria militar, construcción, marina y aeroespacial.El tamaño del mercado es limitado pero el margen de beneficio es alto y las barreras fuertes. Depende principalmente de pedidos gubernamentales y corporativos y se encuentra en la etapa de crecimiento de la segmentación vertical.Los proyectos típicos incluyenIntuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie y más.
#robot humanoide(Robots humanoides)
Considerada como la “plataforma laboral universal” del futuro.
Empresa representativa:Tesla (Optimus), Figure AI (Figura 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree, UBTECH, Zhiyuan Robot, etc.
Los robots humanoides son la dirección fronteriza que más atención atrae en este momento. Su valor fundamental radica en adaptar las estructuras humanoides a los espacios sociales existentes y se considera una forma clave que conduce a una «plataforma laboral universal».A diferencia de los robots industriales que buscan una eficiencia extrema, los robots humanoides enfatizanAdaptabilidad general y transferibilidad de tareas., puede ingresar a fábricas, hogares y espacios públicos sin modificar el medio ambiente.
Actualmente, la mayoría de los robots humanoides todavía están atrapados enetapa de demostración de tecnología, verificando principalmente el equilibrio dinámico, la marcha y la capacidad operativa.Aunque ya hay algunos proyectos enaltamente controladoLas implementaciones a pequeña escala (como Figure × BMW, Agility Digit) han comenzado en escenarios de fábrica, y se espera que más fabricantes (como 1X) ingresen a la distribución temprana a partir de 2026, pero aún están por llegar.Aplicación restringida de «escena estrecha, tarea única», en lugar de la implementación de una fuerza laboral universal en el verdadero sentido. En general, todavía pasarán varios años hasta que se comercialice a gran escala.Los principales obstáculos incluyen: problemas de control, como la coordinación con múltiples grados de libertad y el equilibrio dinámico en tiempo real; problemas de consumo de energía y duración de la batería limitados por la densidad de energía de la batería y la eficiencia de conducción;vínculos entre percepción y toma de decisiones que son propensos a la inestabilidad y difíciles de generalizar en un entorno abierto; importantes lagunas de datos (difícil respaldar la capacitación en estrategia general); la migración entre cuerpos aún no se ha superado; y las cadenas de suministro de hardware y las curvas de costos (especialmente fuera de China) todavía constituyen umbrales realistas, lo que hace más difícil lograr una implementación a gran escala y de bajo costo.
Se espera que el futuro camino de comercialización pase por tres etapas: a corto plazo yDemostración como servicioPrincipalmente, apoyándose en proyectos piloto y subvenciones;a medio plazo evolucionará haciaRobótica como servicio (RaaS), construir una ecología de tareas y habilidades; a largo plazoNube de fuerza laboralconServicio de suscripción inteligenteComo núcleo, promovemos el cambio de enfoque en el valor de la fabricación de hardware al software y las redes de servicios. En términos generales, los robots humanoides se encuentran en un período crítico de transición de la demostración al autoaprendizaje. Si pueden cruzar el triple umbral de control, costo y algoritmo en el futuro determinará si realmente pueden realizar inteligencia incorporada.
IA × Robots: El amanecer de la era de la inteligencia encarnada
La automatización tradicional se basa principalmente en la preprogramación y el control de tuberías (como la arquitectura DSOP de detección-planificación-control) y solo puede ejecutarse de manera confiable en un entorno estructurado.El mundo real es más complejo y cambiante, y la nueva generación de inteligencia incorporada (Embodied AI) sigue otro paradigma: a través de grandes modelos y aprendizaje de representación unificada, los robots tienen la capacidad de «comprender, predecir y actuar» en todos los escenarios.Énfasis en la inteligencia encarnadaCuerpo (hardware) + cerebro (modelo) + entorno (interacción)Acoplamiento dinámico, el robot es el portador y la inteligencia es el núcleo.
La IA generativa pertenece aLa inteligencia en el mundo del lenguaje, bueno para comprender símbolos y semántica; La IA incorporada pertenece ainteligencia del mundo real, dominar la percepción y la acción. Los dos corresponden a «cerebro» y «cuerpo», respectivamente, y representan dos líneas principales paralelas de evolución de la IA.Desde una perspectiva de nivel de inteligencia, la inteligencia incorporada es más avanzada que la IA generativa, pero su madurez aún está muy por detrás.LLM se basa en el corpus masivo de Internet para formar un circuito cerrado claro de «datos → potencia informática → implementación»;mientras que la inteligencia del robot requierePrimera perspectiva, multimodal, datos fuertemente ligados a acciones.——Incluyendo trayectorias de control remoto, videos en perspectiva en primera persona, mapas espaciales, secuencias de operaciones, etc. Estos datosNo existe naturalmente, deben generarse mediante interacción real o simulación de alta fidelidad y, por tanto, son más escasos y caros.Aunque la simulación y los datos sintéticos son útiles, todavía no pueden reemplazar la experiencia real del movimiento de los sensores. Es por eso que Tesla, Figure, etc. deben construir sus propias fábricas de datos de operación remota, y también por qué aparecen fábricas de anotaciones de datos de terceros en el sudeste asiático.En resumen:LLM aprende de datos fácilmente disponibles, mientras que los robots deben «crear» datos interactuando con el mundo físico..En los próximos 5 a 10 años, los dos estarán profundamente integrados en el modelo Visión-Lenguaje-Acción y la arquitectura del Agente Encarnado: el LLM es responsable de la cognición y la planificación de alto nivel, y el robot es responsable de la ejecución en el mundo real, formando un circuito cerrado bidireccional de datos y acciones, promoviendo conjuntamente la IA desde la «inteligencia lingüística» hasta la real.Inteligencia General (AGI).
El sistema tecnológico central de la inteligencia incorporada puede considerarse como una pila de inteligencia ascendente:VLA (fusión de percepción), RL/IL/SSL (aprendizaje inteligente), Sim2Real (transferencia de realidad), World Model (modelado cognitivo) y colaboración entre múltiples agentes y razonamiento de memoria (Swarm & Reasoning).Entre ellos, VLA y RL/IL/SSL son los «motores» de la inteligencia incorporada, que determinan su implementación y comercialización; Sim2Real y World Model son tecnologías clave que conectan la capacitación virtual y la ejecución en el mundo real;La colaboración entre múltiples agentes y el razonamiento de la memoria representan una evolución metacognitiva y grupal de nivel superior.

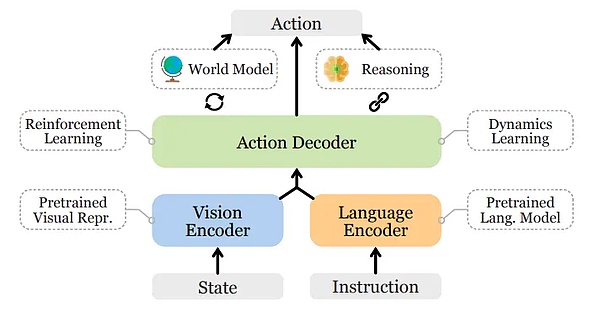
Comprensión perceptual: Modelo Visión-Lenguaje-Acción (Visión-Lenguaje-Acción)
El modelo VLA integraVisión—Lenguaje—AcciónTres canales permiten al robot comprender las intenciones del lenguaje humano y traducirlas en comportamientos operativos específicos.Su proceso de ejecución incluye análisis semántico, reconocimiento de objetivos (localización de objetos objetivo a partir de información visual), planificación de rutas y ejecución de acciones, logrando así un ciclo cerrado de «comprensión de la semántica, percepción del mundo y realización de tareas», que es uno de los avances clave en la inteligencia incorporada.Los proyectos representativos actuales incluyenGoogle RT-X, Meta Ego-Exo y Figure Helix, que demuestran respectivamente direcciones de vanguardia como la comprensión intermodal, la percepción inmersiva y el control basado en el lenguaje.
Actualmente, VLA se encuentra todavía en sus primeras etapas y enfrenta cuatro cuellos de botella principales:
-
Ambigüedad semántica y generalización débil de tareas.: Los modelos tienen dificultades para comprender instrucciones vagas y abiertas;
-
Alineación inestable de visión y movimiento.: Los errores de percepción se amplifican en la planificación y ejecución de rutas;
-
Los datos multimodales son escasos y los estándares son inconsistentes: El costo de recopilación y etiquetado es alto, lo que dificulta la formación de un volante de datos a gran escala;
-
Desafíos del eje temporal y del eje espacial de las tareas a largo plazo: Una duración de tarea demasiado larga conduce a capacidades de memoria y planificación insuficientes, mientras que un rango espacial demasiado grande requiere que el modelo razone sobre cosas «fuera del campo de visión». El VLA actual carece de modelos mundiales estables y capacidades de razonamiento a través del espacio.
Estos problemas limitan conjuntamente la capacidad de generalización entre escenarios y el proceso de implementación a gran escala de VLA.
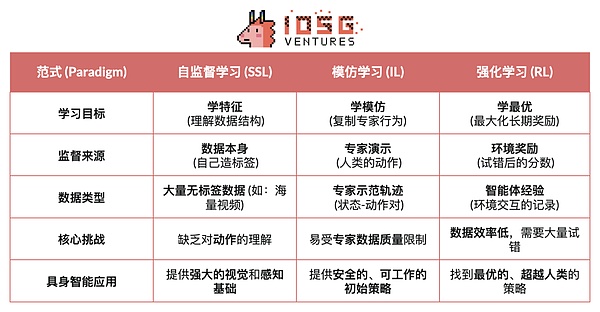
Aprendizaje inteligente: aprendizaje autosupervisado (SSL), aprendizaje por imitación (IL) y aprendizaje por refuerzo (RL)
-
aprendizaje auto supervisado(Aprendizaje autosupervisado): extrae automáticamente características semánticas de los datos sensoriales para permitir que los robots «comprendan el mundo». Equivale a dejar que la máquina aprenda.Observación y representación.
-
aprendizaje por imitación(Aprendizaje por imitación): Domine rápidamente las habilidades básicas imitando demostraciones humanas o ejemplos de expertos. Equivale a dejar que la máquina aprenda.actuar como un ser humano.
-
aprendizaje por refuerzo(Aprendizaje por refuerzo): A través del mecanismo de «recompensa-castigo», el robot optimiza su estrategia de acción mediante prueba y error continuo. Equivale a dejar que la máquina aprenda.Crecer a través de prueba y error.
En Embodied AI, el aprendizaje autosupervisado (SSL) tiene como objetivo permitir que los robots predigan cambios de estado y leyes físicas a través de datos sensoriales, comprendiendo así la estructura causal del mundo; el aprendizaje por refuerzo (RL) es el motor central de la formación de inteligencia, que impulsa a los robots a dominar comportamientos complejos como caminar, agarrar y evitar obstáculos mediante la interacción con el entorno y la optimización de prueba y error basada en señales de recompensa;El aprendizaje por imitación (IL) acelera este proceso a través de la demostración humana, lo que permite a los robots adquirir rápidamente acciones previas.La dirección general actual es combinar los tres para construir un marco de aprendizaje jerárquico: SSL proporciona una base de representación, IL brinda antecedentes humanos y RL impulsa la optimización de políticas para equilibrar la eficiencia y la estabilidad, que en conjunto constituyen el mecanismo central de la inteligencia incorporada desde la comprensión hasta la acción.
Migración de la realidad: Sim2Real: el salto de la simulación a la realidad
Sim2Real(Simulación a Realidad) es permitir que los robots completen su capacitación en un entorno virtual y luego migren al mundo real.Utiliza entornos de simulación de alta fidelidad comoNVIDIA Isaac Sim & Omniverso, DeepMind MuJoCo) genera datos interactivos a gran escala, lo que reduce significativamente los costos de capacitación y el desgaste del hardware.Su núcleo es reducir el «brecha de realidad simulada”, los principales métodos incluyen:
-
aleatorización de dominio(Aleatorización de dominio): ajuste aleatoriamente la iluminación, la fricción, el ruido y otros parámetros durante la simulación para mejorar la capacidad de generalización del modelo;
-
Calibración de consistencia física: Utilice datos de sensores reales para calibrar el motor de simulación y mejorar la fidelidad física;
-
Ajuste adaptativo(Ajuste fino adaptativo): realice un reentrenamiento rápido en el entorno real para lograr una migración estable.
Sim2Real es el vínculo central en la implementación de la inteligencia incorporada, que permite a los modelos de IA aprender el circuito cerrado de «percepción-decisión-control» en un mundo virtual seguro y de bajo costo.Sim2Real ha madurado en el entrenamiento de simulación (como NVIDIA Isaac Sim, MuJoCo), pero la migración de la realidad todavía está limitada por Reality Gap, la alta potencia informática y los costos de etiquetado, así como por una generalización y seguridad insuficientes en un entorno abierto.A pesar de esto, la simulación como servicio (SimaaS) se está convirtiendo en la infraestructura más liviana pero estratégicamente más valiosa en la era de la inteligencia incorporada.Su modelo de negocio incluye suscripción a plataforma (PaaS), generación de datos (DaaS) y verificación de seguridad (VaaS).
Modelado cognitivo: modelo mundial: el «mundo interior» del robot
modelo mundial(World Model) es el «cerebro interno» de la inteligencia encarnada, que permite a los robots simular internamente el entorno y las consecuencias de las acciones para lograr predicciones y razonamientos.Construye una representación interna predecible al aprender las leyes dinámicas del entorno, lo que permite al agente tener una «vista previa» de los resultados antes de la ejecución, evolucionando de un ejecutor pasivo a un razonador activo.Los proyectos representativos incluyen DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim, etc. Las rutas tecnológicas típicas incluyen:
-
Modelado de variables latentes(Modelado de dinámica latente): comprime la percepción de alta dimensión en un espacio de estado latente;
-
Entrenamiento de la imaginación para la predicción de series temporales.(Planificación basada en imaginación): prueba y error virtual y predicción de ruta en el modelo;
-
Aprendizaje por refuerzo basado en modelos(RL basado en modelos): Reemplace el entorno real con un modelo mundial para reducir los costos de capacitación.
World Model está a la vanguardia teórica de la inteligencia incorporada y es el camino central para que los robots pasen de la inteligencia «reactiva» a la «predictiva».Sin embargo, todavía está limitado por desafíos como modelos complejos, predicciones inestables a largo plazo y la falta de estándares unificados.
Inteligencia de enjambre y razonamiento de la memoria: de la acción individual a la cognición colaborativa
Los sistemas multiagente y la memoria y el razonamiento representan dos direcciones importantes en la evolución de la inteligencia incorporada desde la «inteligencia individual» hasta la «inteligencia grupal» y la «inteligencia cognitiva».Los dos apoyan conjuntamente el sistema inteligente.aprendizaje colaborativoconadaptación a largo plazoHabilidad.
#Colaboración multiagente (Swarm/Cooperative RL):
Se refiere a la realización de la toma de decisiones colaborativa y la asignación de tareas por parte de múltiples agentes en un entorno compartido a través del aprendizaje por refuerzo distribuido o colaborativo.Existe una sólida base de investigación en esta dirección, comoEl experimento OpenAI Hide-and-Seek demuestra la cooperación espontánea de múltiples agentes y el surgimiento de estrategias, algoritmos DeepMind QMIX y MADDPGProporciona un marco de colaboración para la capacitación centralizada y la ejecución descentralizada.Este tipo de método se ha aplicado y verificado en escenarios como programación, inspección y control de clústeres de robots de almacén.
#Memoria y razonamiento
Centrarse en dotar a los agentes de memoria a largo plazo, comprensión situacional y capacidades de razonamiento causal es una dirección clave para lograr la transferencia entre tareas y la autoplanificación.típicoLa investigación incluye DeepMind Gato (agente multitarea unificado de control de percepción, lenguaje y control) y la serie DeepMind Dreamer (planificación imaginativa basada en un modelo mundial), así como agentes encarnados abiertos como Voyager, que utiliza memoria externa paraLograr un aprendizaje continuo con la autoevolución.Estos sistemas sientan las bases para que los robots tengan la capacidad de «recordar el pasado y deducir el futuro».
Panorama global de la industria de la inteligencia incorporada: la cooperación y la competencia coexisten

La industria mundial de la robótica se encuentra en un período de «profundización de la competencia y la cooperación».La eficiencia de la cadena de suministro de China, las capacidades de inteligencia artificial de Estados Unidos, la precisión de las piezas de Japón y los estándares industriales de Europa darán forma conjuntamente al patrón a largo plazo de la industria robótica global.
-
Estados UnidosManténgase a la vanguardia en modelos y software de IA de vanguardia (DeepMind, OpenAI, NVIDIA), pero esa ventaja no se extiende al hardware robótico.Los fabricantes chinos tienen más ventajas en cuanto a velocidad de iteración y rendimiento en escenas de la vida real.Estados Unidos ha promovido la relocalización de industrias a través de la Ley CHIPS y la Ley de Reducción de la Inflación (IRA).
-
ChinaBasándose en la fabricación a gran escala, la integración vertical y el desarrollo impulsado por políticas, ha adquirido ventajas líderes en los campos de piezas, fábricas automatizadas y robots humanoides, y tiene capacidades excepcionales de hardware y cadena de suministro.Yushu y UBTECH han logrado la producción en masa y se están extendiendo al nivel de toma de decisiones inteligente.Sin embargo, todavía existe una gran brecha entre China y Estados Unidos en términos de algoritmos y entrenamiento de simulación.
-
JapónTiene un monopolio a largo plazo sobre componentes de alta precisión y tecnología de control de movimiento, y su sistema industrial es estable.Sin embargo, la integración del modelo de IA aún se encuentra en sus primeras etapas y el ritmo de innovación es relativamente estable.
-
Corea del SurSe destaca en la popularización de los robots de consumo, liderada por empresas como LG y NAVER Labs, y tiene un ecosistema de robots de servicio sólido y maduro.
-
EuropaEl sistema de ingeniería y los estándares de seguridad están completos, y 1X Robotics y otros permanecen activos a nivel de I+D, pero algunos vínculos de fabricación se han reubicado y el enfoque de la innovación está sesgado hacia la colaboración y la estandarización.
Robot × IA × Web3: visión narrativa y camino realista
En 2025, emerge una nueva narrativa en la industria Web3 que se fusiona con los bots y la IA.Aunque Web3 se considera el protocolo subyacente de la economía descentralizada de las máquinas, su valor combinado y su viabilidad en diferentes niveles todavía están claramente diferenciados:
-
Capa de servicios y fabricación de hardwareWeb3, que requiere mucho capital y es un circuito cerrado de datos débiles, actualmente solo puede desempeñar un papel auxiliar en enlaces de borde, como la financiación de la cadena de suministro o el arrendamiento de equipos;
-
Capa de ecosistema de simulación y software.El grado de compatibilidad es alto. Los datos de simulación y las tareas de capacitación se pueden cargar en la cadena para confirmar los derechos. Los agentes y módulos de habilidades también se pueden verificar a través deNFT o token de agenteRealizar capitalización;
-
capa de plataforma, las redes descentralizadas de trabajo y colaboración están mostrando su mayor potencial: Web3 puede construir gradualmente un «mercado de trabajo de máquinas» creíble a través de un mecanismo integrado de identidad, incentivos y gobernanza, sentando el prototipo institucional para la futura economía de máquinas.

Desde una perspectiva de largo plazo,Capa de colaboración y plataformaEs la dirección más valiosa en la integración de Web3, robots e IA. A medida que los robots adquieren gradualmente capacidades de percepción, lenguaje y aprendizaje, evolucionan hacia individuos inteligentes capaces de tomar decisiones de forma autónoma, colaborar y crear valor económico.Estos “trabajadores inteligentes” todavía necesitan cruzar cuatro fronteras para participar verdaderamente en el sistema económico.Identidad, confianza, incentivos y gobernanzaumbral central.
-
encapa de identidad, la máquina debe tener una identidad digital confirmable y rastreable.pasarA través de la máquina DID,Cada robot, sensor o dron puede generar una «tarjeta de identificación» única y verificable en la cadena, vinculando su propiedad, registros de comportamiento y alcance de autoridad para lograr una interacción segura y una definición de responsabilidades.
-
encapa de confianza, la clave es hacer que el “trabajo de las máquinas” sea verificable, mensurable y mensurablePrecios.Con la ayuda de contratos inteligentes, oráculos y mecanismos de auditoría, combinados con Prueba de trabajo físico (PoPW), Entorno de ejecución confiable (TEE) y Prueba de conocimiento cero (ZKP), se puede garantizar la autenticidad y trazabilidad del proceso de ejecución de tareas, haciendo que el comportamiento de la máquina sea empírico.Valor económico contable.
-
enCapa de incentivos, pases Web3Sistema de incentivos de tokens, abstracción de cuentas y canal de estado.Realice liquidación automática y transferencia de valor entre máquinas. Los robots pueden completar el alquiler de potencia informática y el intercambio de datos mediante micropagos, y utilizar mecanismos de promesa y penalización para garantizar el desempeño de las tareas;Con la ayuda de contratos inteligentes y oráculos, también se puede formar un «mercado de colaboración de máquinas» descentralizado que no requiere programación manual.
-
enGobernanzaCuando la máquina tiene capacidades de autonomía a largo plazo, Web3 proporciona un marco de gobernanza transparente y programable:Utilice DAO para gobernar los parámetros del sistema de toma de decisiones conjunta y mantener la seguridad y el orden con mecanismos de reputación y firmas múltiples.A largo plazo, esto empujará a la sociedad de las máquinas hacia la etapa de «gobernanza algorítmica»: los humanos establecen metas y límites, y las máquinas utilizan contratos para mantener incentivos y equilibrio.
La visión definitiva para la integración de Web3 y robots: red de evaluación del entorno real——Un «motor de razonamiento del mundo real» compuesto por robots distribuidos que prueba y compara continuamente las capacidades del modelo en escenarios físicos diversos y complejos;yMercado laboral de robots——Los robots realizan tareas verificables de la vida real en todo el mundo, obtienen ganancias mediante liquidaciones en cadena y reinvierten el valor en potencia informática o actualizaciones de hardware.
Desde una perspectiva práctica, la combinación de inteligencia incorporada y Web3 aún se encuentra en la etapa inicial de exploración, y la economía descentralizada de inteligencia artificial permanece más en el nivel narrativo y impulsado por la comunidad. En realidad, las direcciones de combinación con potencial factible se reflejan principalmente en los siguientes tres aspectos:
(1)Crowdsourcing de datos y confirmación de derechos——Web3 alienta a los contribuyentes a cargar datos del mundo real a través de mecanismos de trazabilidad e incentivos en cadena;
(2)Participación global de cola larga——Los micropagos transfronterizos y los mecanismos de microincentivos reducen eficazmente los costos de recopilación y distribución de datos;
(3)Financiarización e innovación colaborativa——El modelo DAO puede promover la assetización de robots, la valetización de ingresos y el mecanismo de liquidación entre máquinas.
En general, a corto plazo, la atención se centrará principalmente enRecopilación de datos y capa de incentivos.;A medio plazo se espera que sea en «Pago en moneda estable + agregación de datos de cola larga«YCapa de liquidación y liquidación de RaaSLograr avances; A largo plazo, si los robots humanoides se popularizan a gran escala,Web3 puede convertirse en el sistema subyacente para la propiedad de máquinas, la distribución de ingresos y la gobernanza, para promover la formación de una economía de máquinas verdaderamente descentralizada.
Mapa ecológico del robot Web3 y casos seleccionados.
Con base en los tres criterios de «progreso verificable, apertura tecnológica y relevancia de la industria», clasifique la situación actualWeb3 × RobóticaProyectos representativos, clasificados según la estructura de cinco capas:Capa de inteligencia del modelo, capa económica de la máquina, capa de recopilación de datos, capa básica de percepción y simulación y capa de ingresos de activos del robot..Para seguir siendo objetivos, hemos eliminado los «puntos críticos» obvios o elementos con información insuficiente; Si hay alguna omisión, corríjanos.

Modelo y amp; Inteligencia
#Openmind – Construyendo Android para robots
mente abiertaEs un sistema operativo de código abierto (Robot OS) para inteligencia incorporada (Embodied AI) y control de robots. El objetivo es construir la primera plataforma de desarrollo y entorno operativo de robots descentralizado del mundo.El núcleo del proyecto consta de dos componentes principales:
-
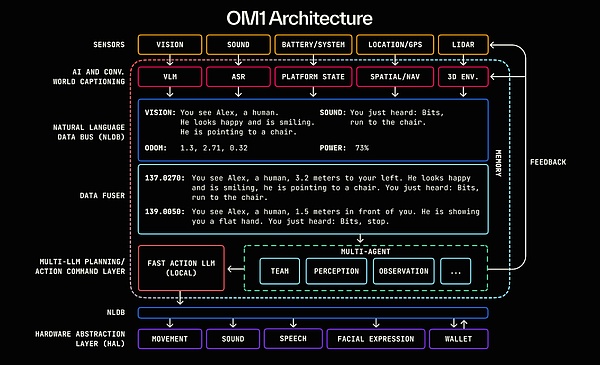
OM1: una capa modular de tiempo de ejecución de IA de código abierto construida sobre ROS2, utilizada para orquestar procesos de percepción, planificación y acción, al servicio de robots físicos y digitales;
-
TELA: La capa de coordinación distribuida (Fabric Coordination Layer) conecta la potencia de la computación en la nube, modelos y robots reales, lo que permite a los desarrolladores controlar y entrenar robots en un entorno unificado.
En esencia, OpenMind sirve comoUna capa intermedia inteligente entre LLM (Large Language Model) y el mundo robótico, permitiendo que la inteligencia del lenguaje se transforme verdaderamente en inteligencia corporizada (Embodied Intelligence), construyendo a partir deComprender (Idioma → Acción)llegarAlineación (Blockchain → Reglas)esqueleto inteligente.
El sistema multicapa OpenMind consigue un completo circuito cerrado colaborativo: los humanos pasanLa aplicación OpenMind proporciona comentarios y anotaciones (datos RLHF), y Fabric Network es responsable deProtocolos de autenticación, asignación de tareas y liquidación.sintonizar, OM1 Robots ejecuta la tareaservicios y seguir la «constitución del robot» en la cadena de bloques para completar auditorías de comportamiento y pagos, logrando asíComentarios humanos → Colaboración de tareas → Liquidación en cadenaUna red de colaboración de máquinas descentralizada.

Progreso del proyecto y evaluación realista
OpenMind se encuentra en la etapa inicial de «tecnológicamente operativo pero no disponible comercialmente». sistema centralOM1 Runtime ha sido de código abierto en GitHub.Puede ejecutarse en múltiples plataformas y admite entradas multimodales. Realiza la comprensión de tareas del lenguaje a la acción a través del bus de datos del lenguaje natural (NLDB). Tiene una gran originalidad pero aún es experimental. Red y cadena de tela.La liquidación solo completa el diseño de la capa de interfaz.
Ecológicamente, el proyecto tieneHardware abierto como Unitree, Ubtech, TurtleBot y Stanford, Oxford, Seoul RoboticsLa cooperación con otras universidades se utiliza principalmente para la verificación de la educación y la investigación y aún no se ha industrializado.La aplicación ahora está en versión beta, pero las funciones de incentivos y tareas aún se encuentran en sus primeras etapas.
En términos de modelo de negocio, OpenMind ha construidoOM1 (sistema de código abierto) + Fabric (protocolo de liquidación) + Skill Marketplace (capa de incentivos)El ecosistema de tres niveles actualmente no tiene ingresos y depende de aproximadamente20 millones de dólares en financiación anticipada(Pantera, Coinbase Ventures, DCG).En general, la tecnología es líder, pero la comercialización y la ecología aún están en sus primeras etapas.Si Fabric se implementa con éxito, se espera que se convierta en «Android en la era de la inteligencia incorporada», pero tiene un ciclo largo, altos riesgos y una fuerte dependencia del hardware.
#CodecFlow: el motor de ejecución para robótica
CodecFlow es un protocolo de capa de ejecución descentralizada (Fabric) basado en la red Solana. Su objetivo es proporcionar un entorno de ejecución bajo demanda para agentes de IA y sistemas robóticos, permitiendo que cada agente tenga una «Máquina Instantánea».El núcleo del proyecto consta de tres módulos:
-
Tela: La capa de agregación de potencia informática entre nubes (Weaver + Shuttle + Gauge) puede generar máquinas virtuales seguras, contenedores GPU o nodos de control de robots para tareas de IA en segundos;
-
SDK optr: Marco de ejecución del agente (interfaz Python), utilizado para crear «Operadores» que pueden operar robots de escritorio, simulación o reales;
-
Incentivos simbólicos: La capa de pagos e incentivos en cadena conecta a proveedores de informática, desarrolladores de agentes y usuarios de tareas automatizadas para formar un mercado de tareas y potencia informática descentralizado.
El objetivo principal de CodecFlow es crear una «base de ejecución descentralizada para IA y operadores de robots» para que cualquier agente pueda ejecutarse de forma segura en cualquier entorno (Windows/Linux/ROS/MuJoCo/controlador de robot) para lograr todo, desdeProgramación de potencia informática(Tela) →Entorno del sistema(Capa del sistema) →percepción y acción(Operador VLA) arquitectura de ejecución común.
Progreso del proyecto y evaluación realista
Se ha lanzado una versión anterior.Marco de tela(Ir) conSDK optr(Python), puede iniciar una instancia informática aislada en una página web o en un entorno de línea de comandos. Se espera que el mercado de operadores se lance a finales de 2025 y se posicione como una capa de ejecución descentralizada para la potencia informática de la IA.Sus principales objetivos de servicio incluyen desarrolladores de inteligencia artificial, equipos de investigación de robots y empresas de operaciones automatizadas.

Capa de economía de máquina
#BitRobot: el laboratorio de robótica abierta del mundo
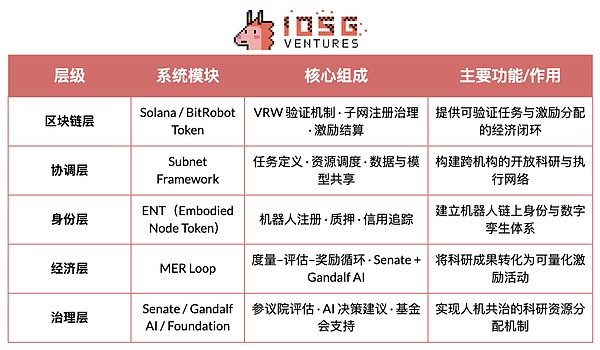
BitRobot es un software desarrollado para robots y AI incorporados.Red descentralizada de investigación y colaboración científica.(Open Robotics Lab), lanzado conjuntamente por FrodoBots Labs y Protocol Labs. Su visión central es:A través de la arquitectura abierta de “Subredes + Mecanismo de Incentivos + Trabajo Verificable (VRW)”, las funciones principales incluyen:
-
Definir y verificar la verdadera contribución de cada tarea del robot a través de estándares VRW (Trabajo Robótico Verificable);
-
Dar a los robots identidad en cadena y responsabilidad económica a través de ENT (Embodied Node Token);
-
Organizar la colaboración interregional entre investigación científica, potencia informática, equipos y operadores a través de subredes;
-
A través del Senado + Gandalf AI, podemos lograr el incentivo para la toma de decisiones y la gobernanza de la investigación científica de la «cogobernanza hombre-máquina».
Desde la publicación del documento técnico en 2025, BitRobot ha ejecutado múltiples subredes (como SN/01 ET Fugi, SN/05 SeeSaw by Virtuals Protocol) para lograr control remoto descentralizado y recopilación de datos de escenarios reales, y lanzó un fondo Grand Challenges de $5 millones para promover competencias de investigación científica en el desarrollo de modelos globales.
#peaq – La economía de las cosas
peaq es una cadena de bloques de Capa 1 construida específicamente para la economía de las máquinas, que proporciona capacidades subyacentes como identidad de la máquina, billeteras en cadena, control de acceso y sincronización de tiempo a nivel de nanosegundos (Universal Machine Time) para millones de robots y dispositivos.Su Robotics SDK permite a los desarrolladores hacer que los robots estén «preparados para la economía de las máquinas» con un código mínimo, lo que permite la interoperabilidad e interacción entre proveedores y sistemas.
Actualmente, peaq ha lanzado la primera granja de robots tokenizada del mundo y admite más de 60 aplicaciones de máquinas del mundo real. Su marco de tokenización ayuda a las empresas de robótica a recaudar capital para hardware intensivo en capital y ampliar la participación desde el B2B/B2C tradicional a una capa comunitaria más amplia.Con un fondo de incentivos a nivel de protocolo inyectado por tarifas de red, peaq puede subsidiar el acceso a nuevos dispositivos y apoyar a los desarrolladores, formando un volante económico que impulsa la expansión acelerada de los proyectos de robótica y física de IA.

Capa de datos
Dirigido a resolver el problema de los escasos y costosos datos del mundo real de alta calidad en el entrenamiento de inteligencia incorporada.Recopile y genere datos de interacción persona-computadora a través de múltiples rutas, incluido el control remoto (PrismaX, BitRobot Network), perspectiva en primera persona y captura de movimiento (Mecka, BitRobot Network, Sapien, Vader, NRN) y simulación y datos sintéticos (BitRobot Network), proporcionando una base de entrenamiento escalable y generalizable para modelos de robots.
Lo que hay que tener claro es, Web3 no es bueno para «producir datos»——En términos de hardware, algoritmo y eficiencia de recopilación, el gigante Web2 supera con creces cualquier proyecto DePIN. Su verdadero valor reside enRemodelar el mecanismo de distribución e incentivo de los datos.Basado en «red de pago en moneda estable + modelo de crowdsourcing», a través de un sistema de incentivos sin permiso y un mecanismo de confirmación de derechos en cadena, se logran liquidaciones de pequeñas cantidades de bajo costo, trazabilidad de contribuciones y participación automática en las ganancias.Sin embargo, el crowdsourcing abierto todavía enfrenta el problema del circuito cerrado entre calidad y demanda: la calidad de los datos es desigual y falta una verificación efectiva y compradores estables.
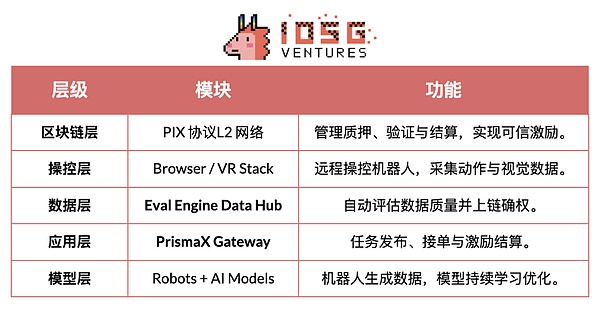
#PrismaX
PrismaX es una red económica de datos y control remoto descentralizada para inteligencia incorporada (Embodied AI). Su objetivo es construir un «mercado laboral global de robots» y permitir que los operadores humanos, los equipos robóticos y los modelos de IA coevolucionen a través del sistema de incentivos en cadena.El núcleo del proyecto consta de dos componentes principales:
-
Pila de teleoperación——Sistema de control remoto (navegador/interfaz VR + SDK), que conecta brazos robóticos globales y robots de servicio para lograr el control humano y la recopilación de datos en tiempo real;
-
Motor de evaluación——Motor de evaluación y verificación de datos (CLIP + DINOv2 + scoring semántico de flujo óptico), que genera puntajes de calidad para cada trayectoria de operación y los carga en la cadena para su liquidación.
PrismaX transforma el comportamiento operativo humano en datos de aprendizaje automático a través de un mecanismo de incentivos descentralizado para construir unControl remoto → recopilación de datos → entrenamiento de modelos → liquidación en cadenaUn circuito cerrado completo para lograr una economía circular en la que “el trabajo humano sea un activo de datos”.
Progreso del proyecto y evaluación realista
PrismaX lanzó una versión beta (gateway.prismax.ai) en agosto de 2025. Los usuarios pueden controlar de forma remota el brazo robótico para realizar experimentos de agarre y generar datos de entrenamiento. Eval Engine ya se está ejecutando internamente.En general, la tecnología PrismaX tiene un alto grado de implementación y un posicionamiento claro.Es la capa intermedia clave que conecta «operación humana × modelo de IA × liquidación de blockchain».Se espera que su potencial a largo plazo se convierta en un «protocolo de datos y trabajo descentralizado en la era de la inteligencia incorporada», pero aún enfrenta desafíos de escala en el corto plazo.
#Red BitRobot
BitRobot Network realiza la recopilación de datos de múltiples fuentes, como video, control remoto y simulación, a través de su subred.SN/01 ET Fugi permite a los usuarios controlar de forma remota el robot para completar tareas y recopilar datos de navegación y percepción en una interacción «al estilo Pokémon Go de la vida real».Este juego llevó a la creación del conjunto de datos FrodoBots-2K, uno de los conjuntos de datos de código abierto más grandes para la navegación hombre-máquina utilizado actualmente por instituciones como UC Berkeley RAIL y Google DeepMind.SN/05 SeeSaw (Protocolo virtual) utiliza iPhone para recopilar datos de vídeo en primera persona a través de crowdsourcing a gran escala en entornos reales.Otras subredes anunciadas, como RoboCap y Rayvo, se centran en recopilar datos de vídeo en primera persona utilizando dispositivos físicos de bajo coste.
#meca
Mecka es una empresa de datos robóticos que utiliza una colección de teléfonos móviles gamificados y dispositivos de hardware personalizados para generar videos en primera persona, datos de movimiento humano y demostraciones de tareas para construir conjuntos de datos multimodales a gran escala y respaldar el entrenamiento de modelos de inteligencia incorporada.
#sapiens
Sapien es una plataforma de crowdsourcing cuyo núcleo es la «inteligencia robótica basada en datos del movimiento humano». Recopila datos de movimiento, postura e interacción humanos a través de dispositivos portátiles y aplicaciones móviles para entrenar modelos de inteligencia incorporada.El proyecto se compromete a construir la red de datos de movimiento humano más grande del mundo, haciendo del comportamiento humano natural una fuente de datos básica para el aprendizaje y la generalización de robots.
#vader
Vader obtiene videos en primera persona y demostraciones de tareas a través de su aplicación MMO del mundo real EgoPlay: los usuarios registran las actividades diarias desde una perspectiva en primera persona y son recompensados con $VADER.Su canal de datos ORN puede convertir imágenes POV originales en conjuntos de datos estructurados procesados con privacidad, incluidas etiquetas de acción y narrativas semánticas, que pueden usarse directamente para el entrenamiento de estrategias de robots humanoides.
#Agentes de la RRN
Una plataforma de datos RL incorporada y gamificada que obtiene datos de demostración humana mediante concursos de simulación y control de robots en el lado del navegador.Las NRN generan trayectorias de comportamiento de cola larga a través de tareas «competitivas», que se utilizan para el aprendizaje por imitación y el aprendizaje por refuerzo continuo, y sirven como primitivos de datos escalables para respaldar la capacitación en políticas de simulación a real.
#Comparación de proyectos de capa de recopilación de datos inteligente incorporada

Percepción y Simulación (Middleware y Simulación)
La capa de percepción y simulación proporciona la infraestructura central para que los robots conecten el mundo físico y la toma de decisiones inteligente, incluido el posicionamiento, la comunicación, el modelado espacial, el entrenamiento de simulación y otras capacidades. Es el «esqueleto de la capa intermedia» para construir sistemas inteligentes incorporados a gran escala. Actualmente, este campo aún se encuentra en la etapa inicial de exploración.Cada proyecto ha formado un diseño diferenciado en las direcciones de posicionamiento de alta precisión, computación en espacio compartido, estandarización de protocolos y simulación distribuida.Aún no existe un estándar unificado ni un ecosistema interoperable.
Middleware y Infraestructura espacial
Las capacidades principales de los robots (navegación, posicionamiento, conectividad y modelado espacial) forman un puente clave entre el mundo físico y la toma de decisiones inteligente.Si bien los proyectos más amplios de DePIN (Silencio, WeatherXM, DIMO) comenzaron a referirse a «robots», los siguientes proyectos están más directamente relacionados con la inteligencia incorporada.
#RoboStack: pila operativa de robots nativa de la nube
RoboStack es un middleware de robot nativo de la nube que realiza programación en tiempo real, control remoto e interoperabilidad multiplataforma de tareas de robot a través de RCP (Protocolo de contexto de robot) y proporciona simulación de nube, orquestación de flujo de trabajo y capacidades de acceso de agentes.
#GEODNET – Red GNSS descentralizada
GEODNET es una red GNSS global descentralizada que proporciona posicionamiento RTK de alta precisión a nivel centimétrico. A través de estaciones base distribuidas e incentivos en cadena, proporciona una «capa de referencia geográfica» en tiempo real para drones, conducción autónoma y robots.
#Auki – Posemesh para Computación Espacial
Auki ha construido una red de computación espacial Posemesh descentralizada que genera mapas ambientales 3D en tiempo real a través de sensores de crowdsourcing y nodos informáticos, proporcionando un punto de referencia espacial compartido para AR, navegación de robots y colaboración multidispositivo. Es la infraestructura clave que conecta el espacio virtual y las escenas reales, promoviendo la integración de AR × Robotics.
#Tashi Network: red de colaboración en red en tiempo real para robots
Red descentralizada en tiempo real para lograr un consenso inferior a 30 ms, intercambio de sensores de baja latencia y sincronización de estado de múltiples robots.Su SDK MeshNet admite SLAM compartido, colaboración grupal y actualizaciones sólidas de mapas, lo que proporciona una capa de colaboración en tiempo real de alto rendimiento para la IA incorporada.
#Staex: una red de telemetría y conectividad descentralizada
Una capa de conectividad descentralizada que se origina en la división de I+D de Deutsche Telekom proporciona comunicaciones seguras, telemetría confiable y capacidades de enrutamiento del dispositivo a la nube, lo que permite a flotas de robots intercambiar datos de manera confiable y colaborar entre diferentes operadores.
Sistema de simulación y entrenamiento (Simulación y Aprendizaje Distribuido)
#Gradiente: hacia una inteligencia abierta
Gradient es un laboratorio de inteligencia artificial que construye «inteligencia abierta» y se compromete a realizar capacitación, razonamiento, verificación y simulación distribuidos basados en infraestructura descentralizada; su pila de tecnología actual incluye Parallax (razonamiento distribuido), Echo (aprendizaje por refuerzo distribuido y capacitación de múltiples agentes) y Gradient Cloud (soluciones de inteligencia artificial para empresas).En el campo de la robótica, la plataforma Mirage proporciona simulación distribuida, un entorno interactivo dinámico y capacidades de aprendizaje paralelo a gran escala para el entrenamiento de inteligencia incorporada para acelerar el entrenamiento de modelos mundiales y estrategias generales.Mirage está explorando una posible colaboración con NVIDIA en su motor Newton.
Capa de ingresos de activos de robots (RobotFi/RWAiFi)
Esta capa se centra en el vínculo clave de transformar los robots de «herramientas productivas» en «activos financieros» y construye la infraestructura financiera de la economía mecánica a través de la tokenización de activos, la distribución del ingreso y la gobernanza descentralizada.Los proyectos representativos incluyen:
#XmaquinaDAO – DAO de IA física
XMAQUINA es un ecosistema descentralizado que proporciona a los usuarios globales canales de participación altamente líquidos para los principales robots humanoides y empresas de inteligencia incorporada, brindando oportunidades que originalmente solo estaban disponibles para las instituciones de capital de riesgo en la cadena.Su token DEUS es a la vez un activo indexado líquido y un portador de gobernanza, utilizado para coordinar la asignación del tesoro y el desarrollo ecológico.A través del Portal DAO y la Plataforma de Lanzamiento de Machine Economy, la comunidad puede mantener y apoyar conjuntamente proyectos emergentes de IA física a través de la tokenización de activos de máquinas y la participación estructurada en la cadena.
#GAIB: la capa económica para la infraestructura de IA
GAIB se compromete a proporcionar una capa económica unificada para la infraestructura física de IA, como GPU y robots, conectar el capital descentralizado con activos reales de infraestructura de IA y construir un sistema económico inteligente verificable, componible y rentable.
En la dirección de los robots, GAIB no «vende tokens de robots», sino que logra la transformación del «flujo de efectivo real → activos de ingresos componibles en la cadena» mediante la financiarización de equipos de robots y contratos de operación (RaaS, recopilación de datos, operación remota, etc.) en la cadena.Este sistema cubre la financiación de hardware (arrendamiento financiero/promesa), el flujo de caja operativo (RaaS/servicio de datos) y los ingresos del flujo de datos (licencia/contrato), etc., haciendo que los activos de los robots y su flujo de caja sean mensurables, valorables y comercializables.
GAIB utiliza AID/sAID como medio de liquidación y de ingresos, garantiza rendimientos estables a través de mecanismos estructurados de control de riesgos (sobrecolateralización, reservas y seguros) y tiene acceso a largo plazo a los mercados de liquidez y derivados DeFi, formando un circuito financiero cerrado desde «activos robóticos» hasta «activos de ingresos combinables».El objetivo es convertirse en la columna vertebral económica de la inteligencia en la era de la IA.
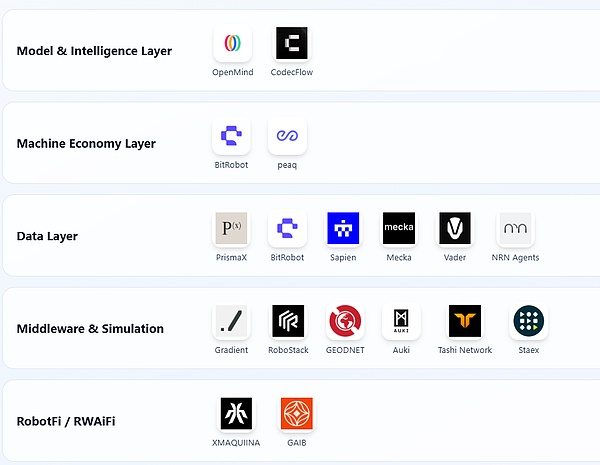
Mapa ecológico del robot web3.
Resumen y perspectivas: desafíos realistas y oportunidades a largo plazo
Desde una perspectiva de largo plazo,Robot × IA × Web3La integración tiene como objetivo construir un sistema económico de máquinas descentralizado (DeRobot Economy) y promover la inteligencia incorporada desde la «automatización de una sola máquina» hasta la colaboración en red con «derechos confirmables, liquidables y de gobernanza». Su lógica central es a través de «Ttoken → implementación → datos → redistribución de valor«Se forma un mecanismo de autocirculación para permitir que los robots, sensores y nodos de potencia informática confirmen derechos, negocien y compartan ganancias.
Sin embargo, desde una perspectiva práctica, este modelo aún se encuentra en la etapa inicial de exploración y aún está lejos de formar un flujo de caja estable y un circuito cerrado comercial a gran escala.La mayoría de los proyectos permanecen en el nivel narrativo, con un despliegue real limitado.La fabricación, operación y mantenimiento de robots son industrias intensivas en capital, y los incentivos simbólicos por sí solos no pueden respaldar la expansión de la infraestructura.Aunque el diseño financiero en cadena es componible, aún no ha resuelto el problema de la valoración del riesgo y la obtención del rendimiento de los activos reales. Por lo tanto, la llamada «autocirculación de la red de máquinas» sigue siendo ideal y su modelo de negocio debe verificarse en la realidad.
-
Capa de inteligencia del modelo(Modelo y capa de inteligencia) es actualmente la dirección con mayor valor a largo plazo.Los sistemas operativos de robots de código abierto representados por OpenMind intentan romper el ecosistema cerrado y unificar la colaboración de múltiples robots y las interfaces de lenguaje a acción.Su visión técnica es clara y el sistema está completo, pero el volumen del proyecto es enorme y el ciclo de verificación es largo, y aún no ha generado una retroalimentación positiva a nivel industrial.
-
capa de economía de máquinas(Capa de economía de máquinas) aún se encuentra en la etapa preliminar. En realidad, el número de robots es limitado y es difícil que la red de identidad e incentivos de DID forme un ciclo autoconsistente.Todavía estamos lejos de una «economía del trabajo mecánico».En el futuro, sólo cuando la inteligencia incorporada se implemente a gran escala, emergerán realmente los efectos económicos de las redes de identidad, asentamiento y colaboración en cadena.
-
Capa de recopilación de datos(Capa de datos) La capa de recopilación de datos tiene el umbral más bajo, pero actualmente es la más cercana a la viabilidad comercial.La recopilación de datos inteligentes incorporados requiere una continuidad espaciotemporal y una precisión semántica de acción extremadamente altas, lo que determina su calidad y reutilización.Cómo equilibrar la «escala de crowdsourcing» y la «confiabilidad de los datos» es un desafío central en la industria.PrismaX primero se dirige a las necesidades del lado B, luego distribuye la recopilación y verificación de tareas para proporcionar plantillas replicables hasta cierto punto, pero la escala ecológica y las transacciones de datos aún requieren tiempo para acumularse.
-
Capa de percepción y simulación.(Middleware y capa de simulación) Aún se encuentra en el período de verificación técnica y carece de estándares e interfaces unificados para formar un ecosistema interoperable.Los resultados de la simulación son difíciles de estandarizar y transferir al entorno real, y la eficiencia de Sim2Real es limitada.
-
capa de renta de activos(RobotFi / RWAiFi) Web3 desempeña principalmente un papel auxiliar en la financiación de la cadena de suministro, el arrendamiento de equipos y la gobernanza de inversiones, mejorando la transparencia y la eficiencia de la liquidación, en lugar de remodelar la lógica industrial.
Por supuesto, creemos que la intersección de Robots × AI × Web3 todavía representa el origen de la próxima generación de sistemas económicos inteligentes.No es sólo una fusión de paradigmas técnicos, sino también una oportunidad para reconstruir las relaciones de producción: cuando las máquinas tengan identidades, incentivos y mecanismos de gobernanza, la colaboración entre humanos y máquinas pasará de la automatización parcial a la autonomía en red.En el corto plazo, esta dirección todavía está dominada por la narrativa y la experimentación, pero el marco institucional y de incentivos que ha establecido está sentando las bases para el orden económico de la futura sociedad maquinal.Desde una perspectiva a largo plazo, la combinación de inteligencia incorporada y Web3 remodelará los límites de la creación de valor, haciendo que los agentes inteligentes sean entidades económicas verdaderamente identificables, colaborativas y rentables.