Auteur : Jacob Zhao @IOSG
Panorama des robots : de l’automatisation industrielle à l’intelligence humanoïde
La chaîne traditionnelle de l’industrie robotique a formé un système complet en couches de bas en haut, couvrantComposants de base – système de contrôle intermédiaire – fabrication de machines complètes – intégration d’applicationsQuatre liens majeurs.Composants de base(Contrôleur, servo, réducteur, capteur, batterie, etc.) La barrière technique est la plus élevée, qui détermine la limite inférieure des performances et du coût global de la machine ;système de contrôleC’est le « cerveau et le cervelet » du robot, responsable de la prise de décision, de la planification et du contrôle des mouvements ;Fabrication de machines entièresRefléter les capacités d’intégration de la chaîne d’approvisionnement.Intégration et application du systèmeDéterminer la profondeur de la commercialisation devient le nouveau noyau de valeur.
Selon les scénarios et les formulaires d’application, les robots mondiaux suivent le « Automatisation industrielle → Intelligence de scénario → Intelligence générale« L’évolution du chemin a formé cinq types principaux :Robots industriels, robots mobiles, robots de service, robots spéciaux et robots humanoïdes
#robot industriel(Robots industriels)
Actuellement la seule piste complète et mature, elle est largement utilisée dans les processus de fabrication tels que le soudage, l’assemblage, la pulvérisation et la manutention.L’industrie a formé un système de chaîne d’approvisionnement standardisé, avec une marge bénéficiaire brute stable et un retour sur investissement clair.L’une des sous-catégories, les robots collaboratifs (Cobots), met l’accent sur la collaboration homme-machine, est légère et facile à déployer, et connaît la croissance la plus rapide.
Entreprise représentative:ABB, Fanuc, Yaskawa, KUKA, Universal Robots, Jieka, Aobo.
#robot mobile(Robots mobiles)
Comprenant l’AGV (véhicule à guidage automatique) et l’AMR (robot mobile autonome), ils ont été mis en œuvre à grande échelle dans l’entreposage logistique, la distribution de commerce électronique et le transport manufacturier, et sont devenus les catégories les plus matures du côté B.
Entreprise représentative: Amazon Robotics, Geek+, Quicktron, Locus Robotics.
#robot de service(Robots de service)
Ciblant des secteurs tels que le nettoyage, la restauration, l’hôtellerie et l’éducation, il s’agit du secteur qui connaît la croissance la plus rapide du côté des consommateurs.Les produits d’entretien sont entrés dans la logique de l’électronique grand public, et la distribution médicale et commerciale accélère leur commercialisation. En outre, un certain nombre de robots opérationnels plus polyvalents font leur apparition (comme le système à double bras de Dyna) – plus flexibles que les produits spécifiques à des tâches spécifiques, mais pas encore aussi polyvalents que les robots humanoïdes.
Entreprise représentative: Ecovacs, Roborock Technology, Pudu Technology, Qinglang Intelligence, iRobot, Dyna, etc.
#Robot spécial
Il sert principalement à des scénarios tels que les soins médicaux, l’industrie militaire, la construction, la marine et l’aérospatiale.La taille du marché est limitée mais la marge bénéficiaire est élevée et les barrières sont fortes. Il s’appuie principalement sur les commandes du gouvernement et des entreprises et est en phase de croissance par segmentation verticale.Les projets typiques incluentIntuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie et plus encore.
#robot humanoïde(Robots humanoïdes)
Considérée comme la « plateforme universelle de main-d’œuvre » du futur.
Entreprise représentative:Tesla (Optimus), Figure AI (Figure 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree, UBTECH, Zhiyuan Robot, etc.
Les robots humanoïdes sont la direction frontière qui attire le plus l’attention en ce moment. Sa valeur fondamentale réside dans l’adaptation des structures humanoïdes aux espaces sociaux existants et est considérée comme une forme clé menant à une « plateforme de travail universelle ».Contrairement aux robots industriels qui recherchent une efficacité extrême, les robots humanoïdes mettent l’accent surAdaptabilité générale et transférabilité des tâches, peut pénétrer dans les usines, les maisons et les espaces publics sans modifier l’environnement.
Actuellement, la plupart des robots humanoïdes sont encore bloquésétape de démonstration technologique, vérifiant principalement l’équilibre dynamique, les capacités de marche et d’exploitation.Bien qu’il y ait déjà quelques projets en courshautement contrôléDes déploiements à petite échelle (tels que Figure × BMW, Agility Digit) ont commencé dans des scénarios d’usine, et on s’attend à ce que davantage de fabricants (tels que 1X) entrent en distribution anticipée à partir de 2026, mais ceux-ci sont encore en cours.Application restreinte de « scène étroite, tâche unique », plutôt que la mise en place d’une main-d’œuvre universelle au sens propre du terme. Globalement, il faudra encore plusieurs années avant une commercialisation à grande échelle.Les principaux goulots d’étranglement comprennent : des problèmes de contrôle tels que la coordination à plusieurs degrés de liberté et l’équilibre dynamique en temps réel ; problèmes de consommation d’énergie et de durée de vie de la batterie limités par la densité énergétique de la batterie et l’efficacité de conduite ;des liens perception-décision sujets à l’instabilité et difficiles à généraliser en milieu ouvert ; des lacunes importantes dans les données (difficile de soutenir la formation en stratégie générale) ; la migration transcorporelle n’est pas encore surmontée ; et les chaînes d’approvisionnement en matériel et les courbes de coûts (en particulier en dehors de la Chine) constituent toujours des seuils réalistes, ce qui rend plus difficile un déploiement à grande échelle et à faible coût.
Le futur parcours de commercialisation devrait passer par trois étapes : à court terme etDémo en tant que servicePrincipalement en s’appuyant sur des projets pilotes et des subventions ;à moyen terme, il évoluera versRobotique en tant que service (RaaS), construire une écologie des tâches et des compétences ; à long termeNuage de main d’œuvreavecService d’abonnement intelligentAu cœur de notre activité, nous promouvons le déplacement de la valeur de la fabrication de matériel vers les réseaux de logiciels et de services. D’une manière générale, les robots humanoïdes se trouvent dans une période de transition critique entre la démonstration et l’auto-apprentissage. Leur capacité à franchir le triple seuil du contrôle, du coût et de l’algorithme à l’avenir déterminera leur capacité à réellement réaliser l’intelligence incarnée.
IA × Robots : l’aube de l’ère de l’intelligence incorporée
L’automatisation traditionnelle repose principalement sur la préprogrammation et le contrôle du pipeline (comme l’architecture DSOP de détection-planification-contrôle) et ne peut fonctionner de manière fiable que dans un environnement structuré.Le monde réel est plus complexe et changeant, et la nouvelle génération d’intelligence incarnée (IA incorporée) suit un autre paradigme : grâce à de grands modèles et à un apprentissage de représentation unifié, les robots ont la capacité de « comprendre-prédire-agir » à travers des scénarios.Accent sur l’intelligence incarnéeCorps (matériel) + cerveau (modèle) + environnement (interaction)Couplage dynamique, le robot est le porteur et l’intelligence est le noyau.
L’IA générative appartient àL’intelligence dans le monde du langage, bon pour comprendre les symboles et la sémantique ; L’IA incarnée appartient àrenseignement du monde réel, maîtriser la perception et l’action. Les deux correspondent respectivement au « cerveau » et au « corps », représentant deux lignes principales parallèles de l’évolution de l’IA.Du point de vue du niveau d’intelligence, l’intelligence incorporée est plus avancée que l’IA générative, mais sa maturité est encore nettement en retard.LLM s’appuie sur le corpus massif d’Internet pour former une boucle fermée claire « données → puissance de calcul → déploiement » ; alors que l’intelligence des robots nécessitePremière perspective, multimodale, données fortement liées aux actions——Y compris les trajectoires télécommandées, les vidéos en perspective à la première personne, les cartes spatiales, les séquences d’opérations, etc.Ces donnéesN’existe pas naturellement, doivent être générés par une interaction réelle ou une simulation haute fidélité et sont donc plus rares et plus chers.Bien que la simulation et les données synthétiques soient utiles, elles ne peuvent toujours pas remplacer une véritable expérience de mouvement des capteurs. C’est pourquoi Tesla, Figure, etc.doivent construire leurs propres usines de données d’opérations à distance, et aussi pourquoi des usines d’annotation de données tierces apparaissent en Asie du Sud-Est. En bref :LLM apprend à partir de données facilement disponibles, alors que les robots doivent « créer » des données en interagissant avec le monde physique.Au cours des 5 à 10 prochaines années, les deux seront profondément intégrés dans le modèle Vision-Langage-Action et dans l’architecture de l’agent incorporé : LLM est responsable de la cognition et de la planification de haut niveau, et le robot est responsable de l’exécution dans le monde réel, formant une boucle fermée bidirectionnelle de données et d’action, promouvant conjointement l’IA de « l’intelligence linguistique » à la réalité.Renseignement général (AGI).
Le système technologique de base de l’intelligence incarnée peut être considéré comme une pile d’intelligence ascendante :VLA (fusion de perception), RL/IL/SSL (apprentissage intelligent), Sim2Real (transfert de réalité), World Model (modélisation cognitive) et collaboration multi-agents et raisonnement par mémoire (Swarm & Reasoning). Parmi eux, VLA et RL/IL/SSL sont les « moteurs » de l’intelligence incarnée, qui déterminent sa mise en œuvre et sa commercialisation ; Sim2Real et World Model sont des technologies clés qui relient la formation virtuelle et l’exécution dans le monde réel ; la collaboration multi-agents et le raisonnement sur la mémoire représentent un groupe de niveau supérieur et une évolution métacognitive.

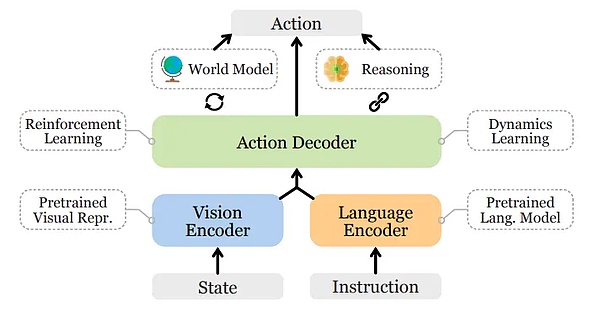
Compréhension perceptuelle : modèle Vision-Langage-Action (Vision-Langage-Action)
Le modèle VLA intègreVision—Langage—ActionTrois canaux permettent au robot de comprendre les intentions du langage humain et de les traduire en comportements opérationnels spécifiques.Son processus d’exécution comprend l’analyse sémantique, la reconnaissance de cibles (localisation d’objets cibles à partir d’une entrée visuelle), la planification de chemins et l’exécution d’actions, réalisant ainsi une boucle fermée de « compréhension de la sémantique – perception du monde – accomplissement de tâches », ce qui constitue l’une des avancées clés dans l’intelligence incarnée. Les projets représentatifs actuels comprennentGoogle RT-X, Meta Ego-Exo et Figure Helix, démontrant respectivement des orientations de pointe telles que la compréhension intermodale, la perception immersive et le contrôle basé sur le langage.
Actuellement, VLA en est encore à ses débuts et est confrontée à quatre principaux goulots d’étranglement :
-
Ambiguïté sémantique et faible généralisation des tâches: Les modèles ont des difficultés à comprendre des instructions vagues et ouvertes ;
-
Alignement instable de la vision et du mouvement: Les erreurs de perception sont amplifiées lors de la planification et de l’exécution du chemin ;
-
Les données multimodales sont rares et les normes sont incohérentes: Le coût de la collecte et de l’étiquetage est élevé, ce qui rend difficile la création d’un volant de données à grande échelle ;
-
Défis des axes temporel et spatial des tâches à long terme: Une durée de tâche trop longue conduit à des capacités de planification et de mémoire insuffisantes, tandis qu’une plage spatiale trop grande oblige le modèle à raisonner sur des choses « en dehors du champ de vision ».Le VLA actuel manque de modèles mondiaux stables et de capacités de raisonnement inter-espace.
Ces problèmes limitent conjointement la capacité de généralisation entre scénarios et le processus de mise en œuvre à grande échelle de la VLA.
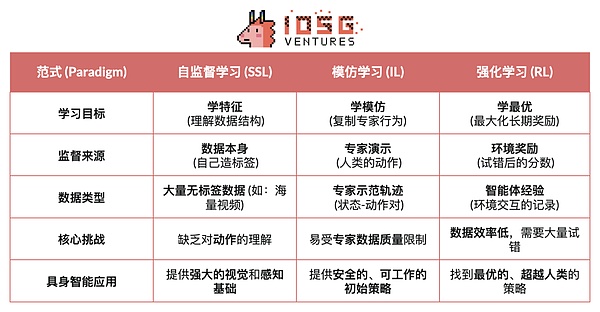
Apprentissage intelligent : apprentissage auto-supervisé (SSL), apprentissage par imitation (IL) et apprentissage par renforcement (RL)
-
apprentissage auto-supervisé(Apprentissage auto-supervisé) : Extrayez automatiquement les caractéristiques sémantiques des données sensorielles pour permettre aux robots de « comprendre le monde ».Cela équivaut à laisser la machine apprendreObservation et représentation.
-
apprentissage par imitation(Apprentissage par imitation) : Maîtrisez rapidement les compétences de base en imitant des démonstrations humaines ou des exemples d’experts.Cela équivaut à laisser la machine apprendreagir comme un être humain.
-
apprentissage par renforcement(Apprentissage par renforcement) : Grâce au mécanisme « récompense-punition », le robot optimise sa stratégie d’action par des essais et des erreurs continus.Cela équivaut à laisser la machine apprendreGrandissez par essais et erreurs.
Dans Embodied AI, l’apprentissage auto-supervisé (SSL) vise à permettre aux robots de prédire les changements d’état et les lois physiques grâce à des données sensorielles, comprenant ainsi la structure causale du monde ; l’apprentissage par renforcement (RL) est le moteur principal de la formation de l’intelligence, conduisant les robots à maîtriser des comportements complexes tels que marcher, saisir et éviter les obstacles grâce à l’interaction avec l’environnement et à l’optimisation par essais et erreurs basée sur des signaux de récompense ;l’apprentissage par imitation (IL) accélère ce processus grâce à la démonstration humaine, permettant aux robots d’acquérir rapidement des actions préalables.L’orientation dominante actuelle est de combiner les trois pour construire un cadre d’apprentissage hiérarchique : SSL fournit une base de représentation, IL donne des priorités humaines et RL conduit l’optimisation des politiques pour équilibrer l’efficacité et la stabilité, qui constituent ensemble le mécanisme central de l’intelligence incarnée, de la compréhension à l’action.
Migration de la réalité : Sim2Real – le saut de la simulation à la réalité
Sim2Réel(Simulation to Reality) consiste à permettre aux robots de suivre une formation dans un environnement virtuel puis de migrer vers le monde réel.Il utilise des environnements de simulation haute fidélité tels queNVIDIA Isaac Sim & Omniverse, DeepMind MuJoCo) génère des données interactives à grande échelle, réduisant considérablement les coûts de formation et l’usure du matériel.Son objectif est de réduire le « écart de réalité simulée», les principales méthodes comprennent :
-
randomisation de domaine(Randomisation du domaine) : ajustez de manière aléatoire l’éclairage, la friction, le bruit et d’autres paramètres pendant la simulation pour améliorer la capacité de généralisation du modèle ;
-
Étalonnage de cohérence physique: Utilisez des données de capteurs réelles pour calibrer le moteur de simulation afin d’améliorer la fidélité physique ;
-
Réglage fin adaptatif(Adaptive Fine-tuning) : recyclage rapide dans des environnements réels pour obtenir une migration stable.
Sim2Real est le maillon central de la mise en œuvre de l’intelligence incorporée, permettant aux modèles d’IA d’apprendre la boucle fermée « perception-décision-contrôle » dans un monde virtuel sûr et peu coûteux.Sim2Real a mûri dans les formations en simulation (comme NVIDIA Isaac Sim, MuJoCo), mais la migration vers la réalité est encore limitée par le Reality Gap, la puissance de calcul élevée et les coûts d’étiquetage, ainsi que par une généralisation et une sécurité insuffisantes dans un environnement ouvert.Malgré cela, la simulation en tant que service (SimaaS) est en train de devenir l’infrastructure la plus légère mais la plus stratégique à l’ère de l’intelligence incorporée.Son modèle économique comprend l’abonnement à une plateforme (PaaS), la génération de données (DaaS) et la vérification de sécurité (VaaS).
Modélisation cognitive : World Model – le « monde intérieur » du robot
modèle mondial(World Model) est le « cerveau interne » de l’intelligence incarnée, permettant aux robots de simuler en interne l’environnement et les conséquences des actions pour réaliser des prédictions et des raisonnements.Il construit une représentation interne prévisible en apprenant les lois dynamiques de l’environnement, permettant à l’agent de « prévisualiser » les résultats avant l’exécution, évoluant d’un exécuteur passif à un raisonneur actif.Les projets représentatifs incluent DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim, etc. Les chemins technologiques typiques incluent :
-
Modélisation des variables latentes(Modélisation de la dynamique latente) : compresser la perception de haute dimension dans un espace d’état latent ;
-
Entraînement à l’imagination pour la prédiction de séries chronologiques(Planification basée sur l’imagination) : essais et erreurs virtuels et prédiction de chemin dans le modèle ;
-
Apprentissage par renforcement basé sur un modèle(RL basé sur un modèle) : remplacez l’environnement réel par un modèle mondial pour réduire les coûts de formation.
Le modèle mondial est à l’avant-garde théorique de l’intelligence incarnée et constitue la voie principale permettant aux robots de passer d’une intelligence « réactive » à une intelligence « prédictive ».Cependant, cette approche reste limitée par des défis tels qu’une modélisation complexe, des prévisions à long terme instables et l’absence de normes unifiées.
Intelligence en essaim et raisonnement mémoriel : de l’action individuelle à la cognition collaborative
Les systèmes multi-agents et la mémoire et le raisonnement représentent deux directions importantes dans l’évolution de l’intelligence incarnée de « l’intelligence individuelle » à « l’intelligence de groupe » et à « l’intelligence cognitive ».Les deux soutiennent conjointement le système intelligentapprentissage collaboratifavecadaptation à long termeCapacité.
#Collaboration multi-agents (Swarm/Cooperative RL) :
Il fait référence à la réalisation d’une prise de décision collaborative et à l’attribution de tâches par plusieurs agents dans un environnement partagé grâce à un apprentissage par renforcement distribué ou collaboratif.Il existe une base de recherche solide dans cette direction, commeL’expérience OpenAI Hide-and-Seek démontre la coopération spontanée multi-agents et l’émergence de stratégies, les algorithmes DeepMind QMIX et MADDPGFournit un cadre collaboratif pour une formation centralisée et une exécution décentralisée.Ce type de méthode a été appliqué et vérifié dans des scénarios tels que la planification, l’inspection et le contrôle de cluster de robots d’entrepôt.
#Mémoire et raisonnement
Se concentrer sur l’équipement des agents en matière de mémoire à long terme, de compréhension de la situation et de capacités de raisonnement causal est une orientation clé pour parvenir au transfert de tâches entre les tâches et à l’auto-planification.typiqueLa recherche comprend DeepMind Gato (agent multitâche unifié de contrôle du langage et de perception) et la série DeepMind Dreamer (planification imaginative basée sur un modèle mondial), ainsi que des agents incarnés ouverts tels que Voyager, qui utilisent la mémoire externe pourParvenez à un apprentissage continu grâce à l’auto-évolution.Ces systèmes jettent les bases de la capacité des robots à « se souvenir du passé et à en déduire le futur ».
Paysage mondial de l’industrie de l’intelligence incorporée : coopération et concurrence coexistent

L’industrie mondiale de la robotique se trouve dans une période de « coopération et d’approfondissement de la concurrence ».L’efficacité de la chaîne d’approvisionnement de la Chine, les capacités d’IA des États-Unis, la précision des pièces détachées du Japon et les normes industrielles européennes façonneront conjointement le modèle à long terme de l’industrie mondiale de la robotique.
-
États-UnisGardez une longueur d’avance en matière de modèles et de logiciels d’IA de pointe (DeepMind, OpenAI, NVIDIA), mais cet avantage ne s’étend pas au matériel robotique.Les fabricants chinois ont plus d’avantages en termes de vitesse d’itération et de performances sur scène réelle.Les États-Unis ont encouragé la relocalisation des industries à travers la loi CHIPS et la loi sur la réduction de l’inflation (IRA).
-
ChineS’appuyant sur une fabrication à grande échelle, une intégration verticale et un développement axé sur les politiques, elle s’est forgée des avantages de premier plan dans les domaines des pièces détachées, des usines automatisées et des robots humanoïdes, et dispose de capacités matérielles et de chaîne d’approvisionnement exceptionnelles.Yushu et UBTECH ont atteint une production de masse et s’étendent jusqu’au niveau de prise de décision intelligente. Cependant, il existe encore un grand écart entre la Chine et les États-Unis en termes d’algorithmes et de formation par simulation.
-
JaponElle détient un monopole à long terme sur les composants de haute précision et la technologie de contrôle de mouvement, et son système industriel est stable.Cependant, l’intégration des modèles d’IA en est encore à ses débuts et le rythme de l’innovation est relativement stable.
-
Corée du SudElle se distingue par la vulgarisation des robots grand public, dirigée par des sociétés telles que LG et NAVER Labs, et dispose d’un écosystème de robots de service mature et solide.
-
EuropeLe système d’ingénierie et les normes de sécurité sont complets, et 1X Robotics et d’autres restent actifs au niveau de la R&D, mais certains liens de fabrication ont été délocalisés et l’innovation est orientée vers la collaboration et la standardisation.
Robot × IA × Web3 : vision narrative et cheminement réaliste
En 2025, un nouveau récit émerge dans l’industrie du Web3 qui fusionne avec les robots et l’IA.Bien que le Web3 soit considéré comme le protocole sous-jacent à l’économie des machines décentralisée, sa valeur combinée et sa faisabilité à différents niveaux restent clairement différenciées :
-
Fabrication de matériel et couche de serviceÀ forte intensité de capital et en boucle fermée de données faibles, Web3 ne peut actuellement jouer qu’un rôle auxiliaire dans les maillons périphériques tels que le financement de la chaîne d’approvisionnement ou le crédit-bail d’équipement ;
-
Couche de simulation et d’écosystème logicielLe degré de compatibilité est élevé. Les données de simulation et les tâches de formation peuvent être téléchargées sur la chaîne pour confirmer les droits. Les agents et les modules de compétences peuvent également être vérifiés viaNFT ou jeton d’agentRéaliser la capitalisation ;
-
couche de plateforme, les réseaux de travail décentralisés et de collaboration montrent leur plus grand potentiel – Web3 peut progressivement construire un « marché du travail mécanique » crédible grâce à un mécanisme intégré d’identité, d’incitations et de gouvernance, posant le prototype institutionnel de la future économie mécanique.

Dans une perspective à long terme,Couche de collaboration et de plate-formeC’est la direction la plus précieuse dans l’intégration du Web3, des robots et de l’IA.À mesure que les robots acquièrent progressivement des capacités de perception, de langage et d’apprentissage, ils évoluent vers des individus intelligents, capables de prendre des décisions autonomes, de collaborer et de créer de la valeur économique.Ces « travailleurs intelligents » doivent encore franchir quatre frontières pour participer véritablement au système économique.Identité, confiance, incitations et gouvernanceseuil central.
-
danscouche d’identité, la machine doit avoir une identité numérique confirmable et traçable.passerGrâce à la machine DID,Chaque robot, capteur ou drone peut générer une « carte d’identité » unique et vérifiable sur la chaîne, liant sa propriété, ses enregistrements de comportement et l’étendue de son autorité pour parvenir à une interaction sûre et à une définition des responsabilités.
-
danscouche de confiance, la clé est de rendre le « travail des machines » vérifiable, mesurable et mesurablePrix.À l’aide de contrats intelligents, d’oracles et de mécanismes d’audit, combinés à la preuve de travail physique (PoPW), à l’environnement d’exécution fiable (TEE) et à la preuve à connaissance nulle (ZKP), l’authenticité et la traçabilité du processus d’exécution des tâches peuvent être garanties, rendant le comportement de la machine empirique.Valeur comptable économique.
-
dansCouche incitative, Web3 passeSystème d’incitation aux jetons, abstraction de compte et canal de statutRéalisez un règlement automatique et un transfert de valeur entre les machines. Les robots peuvent effectuer la location de puissance de calcul et le partage de données via des micropaiements, et utiliser des mécanismes de caution et de pénalité pour garantir l’exécution des tâches ;avec l’aide de contrats intelligents et d’oracles, un « marché de collaboration entre machines » décentralisé qui ne nécessite pas de planification manuelle peut également être formé.
-
dansGouvernance, lorsque la machine dispose de capacités d’autonomie à long terme, Web3 fournit un cadre de gouvernance transparent et programmable :Utilisez DAO pour gérer les paramètres du système de prise de décision commune et maintenir la sécurité et l’ordre grâce à des mécanismes de signatures multiples et de réputation.À long terme, cela poussera la société des machines vers le stade de « gouvernance algorithmique » : les humains fixent des objectifs et des limites, et les machines utilisent des contrats pour maintenir les incitations et l’équilibre.
La vision ultime pour l’intégration du Web3 et des robots : réseau d’évaluation en environnement réel——Un « moteur de raisonnement du monde réel » composé de robots distribués qui teste et évalue en permanence les capacités des modèles dans des scénarios physiques divers et complexes ;etLe marché du travail des robots——Les robots effectuent des tâches réelles vérifiables dans le monde entier, réalisent des bénéfices grâce au règlement en chaîne et réinvestissent la valeur dans la puissance de calcul ou les mises à niveau matérielles.
D’un point de vue pratique, la combinaison de l’intelligence incarnée et du Web3 en est encore à ses premiers stades exploratoires, et l’économie décentralisée de l’intelligence artificielle reste davantage au niveau narratif et communautaire. En réalité, les directions de combinaison avec un potentiel réalisable se reflètent principalement dans les trois aspects suivants :
(1)Crowdsourcing de données et confirmation des droits——Web3 encourage les contributeurs à télécharger des données du monde réel grâce à des mécanismes d’incitation et de traçabilité en chaîne ;
(2)Participation mondiale à longue traîne——Les micropaiements transfrontaliers et les mécanismes de micro-incitations réduisent efficacement les coûts de collecte et de distribution des données ;
(3)Financiarisation et innovation collaborative——Le modèle DAO peut favoriser l’actifisation des robots, la comptabilisation des revenus et le mécanisme de règlement entre machines.
Globalement, à court terme, l’accent est mis surCollecte de données et couche d’incitation;À moyen terme, il devrait être en « Paiement en devise stable + agrégation de données à longue traîne« EtCouche d’actif et de règlement RaaSRéaliser des percées ; à terme, si les robots humanoïdes sont popularisés à grande échelle,Web3 pourrait devenir le système sous-jacent à la propriété des machines, à la répartition des revenus et à la gouvernance, pour promouvoir la formation d’une économie machinique véritablement décentralisée.
Carte écologique des robots Web3 et cas sélectionnés
Sur la base des trois critères « progrès vérifiables, ouverture technologique et pertinence industrielle », trier les problèmes actuelsWeb3 × RobotiqueProjets représentatifs, classés selon la structure à cinq niveaux :Couche d’intelligence du modèle, couche économique des machines, couche de collecte de données, couche de base de perception et de simulation et couche de revenus des actifs du robot.Afin de rester objectifs, nous avons éliminé les « points chauds » évidents ou les éléments contenant des informations insuffisantes ; s’il y a des omissions, veuillez nous corriger.

Modèle et amp; Renseignement
#Openmind – Créer Android pour les robots
Esprit ouvertIl s’agit d’un système d’exploitation open source (Robot OS) pour l’intelligence incorporée (Emboded AI) et le contrôle des robots. L’objectif est de créer le premier environnement d’exploitation et plate-forme de développement de robots décentralisés au monde.Le cœur du projet se compose de deux composantes majeures :
-
OM1: Une couche d’exécution d’IA open source modulaire construite sur ROS2, utilisée pour orchestrer les pipelines de perception, de planification et d’action, au service des robots numériques et physiques ;
-
TISSU: La couche de coordination distribuée (Fabric Coordination Layer) connecte la puissance de calcul du cloud, les modèles et les robots réels, permettant aux développeurs de contrôler et de former des robots dans un environnement unifié.
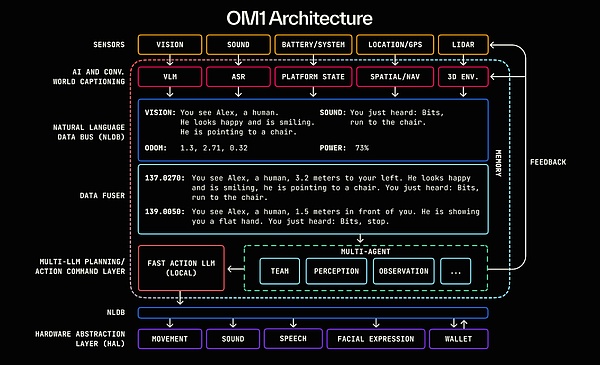
À la base, OpenMind sert deUne couche intermédiaire intelligente entre le LLM (Large Language Model) et le monde robotique, permettant à l’intelligence du langage de se transformer véritablement en intelligence incarnée (Intelligence Embodiée), en s’appuyant surComprendre (Langage → Action)ArriverAlignement (Blockchain → Règles)squelette intelligent.
Le système multicouche OpenMind réalise une boucle fermée collaborative complète : les humains passentOpenMind App fournit des commentaires et des annotations (données RLHF), et Fabric Network est responsable deProtocoles d’authentification, d’attribution des tâches et de règlementtune, OM1 Robots exécute la tâcheservices et suivez la « constitution du robot » sur la blockchain pour effectuer des audits comportementaux et des paiements, réalisant ainsiCommentaires humains → Collaboration sur les tâches → Règlement en chaîneUn réseau de collaboration de machines décentralisé.

Avancement du projet et évaluation réaliste
OpenMind en est au tout début « technologiquement opérationnel mais commercialement indisponible ». système de baseOM1 Runtime est open source sur GitHub.Il peut fonctionner sur plusieurs plates-formes et prend en charge l’entrée multimodale. Il réalise la compréhension des tâches langage-action via le Natural Language Data Bus (NLDB). Il a une grande originalité mais reste expérimental. Réseau et chaîne de tissuLe règlement ne fait que compléter la conception de la couche d’interface.
Sur le plan écologique, le projet aMatériel ouvert tel que Unitree, Ubtech, TurtleBot et Stanford, Oxford, Seoul RoboticsLa coopération avec d’autres universités est principalement utilisée pour la vérification de l’enseignement et de la recherche et n’est pas encore industrialisée.L’application est maintenant en version bêta, mais les fonctionnalités d’incitation et de tâches en sont encore à leurs débuts.
En termes de modèle économique, OpenMind a construitOM1 (système open source) + Fabric (protocole de règlement) + Skill Marketplace (couche incitative)L’écosystème à trois niveaux n’a actuellement aucun revenu et dépend d’environ20 millions de dollars de financement initial(Pantera, Coinbase Ventures, DCG).Dans l’ensemble, la technologie est à la pointe, mais la commercialisation et l’écologie en sont encore à leurs balbutiements.Si Fabric est mis en œuvre avec succès, il devrait devenir « Android à l’ère de l’intelligence incorporée », mais il présente un cycle long, des risques élevés et une forte dépendance au matériel.
#CodecFlow – Le moteur d’exécution pour la robotique
CodecFlow est un protocole de couche d’exécution décentralisé (Fabric) basé sur le réseau Solana. Il vise à fournir un environnement d’exécution à la demande pour les agents d’IA et les systèmes robotiques, permettant à chaque agent de disposer d’une « machine instantanée ».Le cœur du projet se compose de trois modules :
-
Tissu: La couche d’agrégation de puissance de calcul cross-cloud (Weaver + Shuttle + Gauge) peut générer des machines virtuelles sécurisées, des conteneurs GPU ou des nœuds de contrôle de robot pour les tâches d’IA en quelques secondes ;
-
SDK optr: Framework d’exécution d’agent (interface Python), utilisé pour créer des « Opérateurs » pouvant faire fonctionner des robots de bureau, de simulation ou réels ;
-
Incitations symboliques: La couche d’incitation et de paiement en chaîne connecte les fournisseurs informatiques, les développeurs d’agents et les utilisateurs de tâches automatisées pour former un marché décentralisé de puissance de calcul et de tâches.
L’objectif principal de CodecFlow est de créer une « base d’exécution décentralisée pour les opérateurs d’IA et de robots » afin que n’importe quel agent puisse s’exécuter en toute sécurité dans n’importe quel environnement (Windows/Linux/ROS/MuJoCo/contrôleur de robot) pour tout réaliser, dePlanification de la puissance de calcul(Tissu) →Environnement système(Couche système) →perception et action(VLA Operator) architecture d’exécution commune.
Avancement du projet et évaluation réaliste
Une version antérieure a été publiéeCadre en tissu(Aller) avecSDK optr(Python), vous pouvez démarrer une instance informatique isolée dans une page Web ou un environnement de ligne de commande. Le marché des opérateurs devrait être lancé fin 2025 et se positionne comme une couche d’exécution décentralisée pour la puissance de calcul de l’IA.Ses principales cibles de services comprennent les développeurs d’IA, les équipes de recherche sur les robots et les sociétés d’exploitation automatisées.

Couche d’économie de machine
#BitRobot – Le laboratoire de robotique ouvert au monde
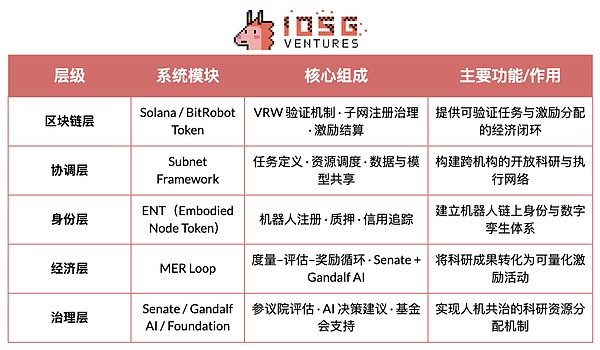
BitRobot est un logiciel développé pour l’IA incorporée et les robots.Réseau de recherche scientifique et de collaboration décentralisé(Open Robotics Lab), lancé conjointement par FrodoBots Labs et Protocol Labs. Sa vision fondamentale est la suivante :Grâce à l’architecture ouverte de « Sous-réseaux + Mécanisme d’incitation + Travail vérifiable (VRW) », les fonctions principales comprennent :
-
Définir et vérifier la véritable contribution de chaque tâche du robot grâce aux normes VRW (Verifiable Robotic Work);
-
Donner aux robots une identité et une responsabilité économique en chaîne via ENT (Embodied Node Token) ;
-
Organiser la collaboration interrégionale entre la recherche scientifique, la puissance de calcul, les équipements et les opérateurs via des sous-réseaux ;
-
Grâce au Sénat + Gandalf AI, nous pouvons réaliser la prise de décision incitative et la gouvernance de la recherche scientifique de la « cogouvernance homme-machine ».
Depuis la publication du livre blanc en 2025, BitRobot a géré plusieurs sous-réseaux (tels que SN/01 ET Fugi, SN/05 SeeSaw by Virtuals Protocol) pour réaliser un contrôle à distance décentralisé et une collecte de données de scénarios réels, et a lancé un fonds Grand Challenges de 5 millions de dollars pour promouvoir des concours de recherche scientifique dans le développement de modèles mondiaux.
#peaq – L’économie des choses
peaq est une blockchain de couche 1 spécialement conçue pour l’économie des machines, offrant des fonctionnalités sous-jacentes telles que l’identité des machines, les portefeuilles en chaîne, le contrôle d’accès et la synchronisation temporelle au niveau de la nanoseconde (Universal Machine Time) pour des millions de robots et d’appareils.Son SDK Robotics permet aux développeurs de rendre les robots « prêts pour l’économie des machines » avec un minimum de code, permettant ainsi l’interopérabilité et l’interaction entre fournisseurs et entre systèmes.
Actuellement, peaq a lancé la première ferme robotisée tokenisée au monde et prend en charge plus de 60 applications machines réelles. Son cadre de tokenisation aide les entreprises de robotique à lever des capitaux pour du matériel à forte intensité de capital et à étendre l’engagement du B2B/B2C traditionnel à une couche communautaire plus large.Grâce à un pool d’incitations au niveau du protocole injecté par les frais de réseau, peaq peut subventionner l’accès aux nouveaux appareils et soutenir les développeurs, formant ainsi un volant économique qui stimule l’expansion accélérée des projets d’IA robotique et physique.

Couche de données
Destiné à résoudre le problème des données rares et coûteuses du monde réel de haute qualité dans la formation à l’intelligence incorporée.Collectez et générez des données d’interaction homme-machine via plusieurs voies, y compris le contrôle à distance (PrismaX, BitRobot Network), la perspective à la première personne et la capture de mouvement (Mecka, BitRobot Network, Sapien, Vader, NRN) et la simulation et les données synthétiques (BitRobot Network), fournissant une base de formation évolutive et généralisable pour les modèles de robots.
Ce qui doit être clair, c’est, le Web3 n’est pas doué pour « produire des données »——En termes de matériel, d’algorithme et d’efficacité de collecte, le géant du Web2 dépasse de loin n’importe quel projet DePIN. Sa vraie valeur réside dansRemodeler le mécanisme de distribution et d’incitation des données.Basé sur « un réseau de paiement en devise stable + un modèle de crowdsourcing », grâce à un système d’incitation sans autorisation et à un mécanisme de confirmation des droits en chaîne, un règlement de petits montants à faible coût, une traçabilité des contributions et un partage automatique des bénéfices sont obtenus.Cependant, le crowdsourcing ouvert reste confronté au problème de la boucle fermée entre la qualité et la demande : la qualité des données est inégale et il y a un manque de vérification efficace et d’acheteurs stables.
#PrismaX
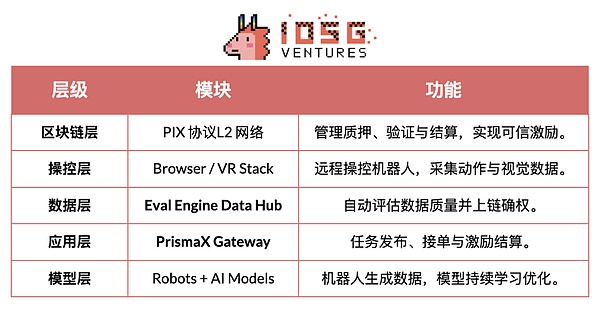
PrismaX est un réseau décentralisé de contrôle à distance et d’économie de données pour l’intelligence incorporée (Emboded AI). Il vise à créer un « marché mondial du travail des robots » et à permettre aux opérateurs humains, aux équipements robotiques et aux modèles d’IA de co-évoluer grâce au système d’incitation en chaîne.Le cœur du projet se compose de deux composantes majeures :
-
Pile de téléopération——Système de contrôle à distance (navigateur/interface VR + SDK), connectant les bras robotiques mondiaux et les robots de service pour réaliser un contrôle humain et une collecte de données en temps réel ;
-
Moteur d’évaluation——Moteur d’évaluation et de vérification des données (CLIP + DINOv2 + notation sémantique du flux optique), qui génère des scores de qualité pour chaque trajectoire d’opération et les télécharge dans la chaîne de règlement.
PrismaX transforme le comportement opérationnel humain en données d’apprentissage automatique grâce à un mécanisme d’incitation décentralisé pour créer unContrôle à distance → collecte de données → formation de modèles → règlement en chaîneUne boucle fermée complète pour parvenir à une économie circulaire dans laquelle « le travail humain est un atout de données ».
Avancement du projet et évaluation réaliste
PrismaX a lancé une version bêta (gateway.prismax.ai) en août 2025. Les utilisateurs peuvent contrôler à distance le bras robotique pour effectuer des expériences de préhension et générer des données d’entraînement. Eval Engine fonctionne déjà en interne.Dans l’ensemble, la technologie PrismaX présente un haut degré de mise en œuvre et un positionnement clair.Il s’agit de la couche intermédiaire clé reliant « opération humaine × modèle d’IA × règlement blockchain ».Son potentiel à long terme devrait devenir un « protocole de travail et de données décentralisé à l’ère de l’intelligence incarnée », mais il reste confronté à des défis d’échelle à court terme.
#Réseau BitRobot
BitRobot Network réalise la collecte de données multi-sources telles que la vidéo, le contrôle à distance et la simulation via son sous-réseau.SN/01 ET Fugi permet aux utilisateurs de contrôler à distance le robot pour effectuer des tâches et collecter des données de navigation et de perception dans une interaction « de style Pokémon Go réel ».Ce gameplay a conduit à la création de l’ensemble de données FrodoBots-2K, l’un des plus grands ensembles de données open source pour la navigation homme-machine actuellement utilisé par des institutions telles que UC Berkeley RAIL et Google DeepMind.SN/05 SeeSaw (Virtual Protocol) utilise l’iPhone pour collecter des données vidéo à la première personne via un crowdsourcing à grande échelle dans des environnements réels.D’autres sous-réseaux annoncés, tels que RoboCap et Rayvo, se concentrent sur la collecte de données vidéo à la première personne à l’aide d’appareils physiques peu coûteux.
#La Mecque
Mecka est une société de données robotiques qui utilise une collection de téléphones mobiles gamifiés et des appareils matériels personnalisés pour collecter des vidéos à la première personne, des données sur les mouvements humains et des démonstrations de tâches afin de créer des ensembles de données multimodales à grande échelle et de soutenir la formation de modèles d’intelligence incarnée.
#Sapien
Sapien est une plateforme de crowdsourcing dont le cœur est « l’intelligence robotique basée sur les données relatives aux mouvements humains ». Il collecte des données sur les mouvements humains, la posture et les interactions via des appareils portables et des applications mobiles pour former des modèles d’intelligence incarnée.Le projet s’engage à construire le plus grand réseau de données sur les mouvements humains au monde, faisant du comportement humain naturel une source de données de base pour l’apprentissage et la généralisation des robots.
#Vador
Vader diffuse des vidéos à la première personne et des démonstrations de tâches via son application MMO réelle EgoPlay : les utilisateurs enregistrent leurs activités quotidiennes à la première personne et sont récompensés par $VADER.Son pipeline de données ORN peut convertir les images POV originales en ensembles de données structurées traitées de manière confidentielle, comprenant des étiquettes d’action et des récits sémantiques, qui peuvent être directement utilisés pour la formation à la stratégie des robots humanoïdes.
#Agents du RRN
Une plate-forme de données RL incarnée et gamifiée qui rassemble des données de démonstration humaine via des compétitions de contrôle et de simulation de robots côté navigateur.NRN génère des trajectoires comportementales à longue traîne à travers des tâches « compétitives », qui sont utilisées pour l’apprentissage par imitation et l’apprentissage par renforcement continu, et servent de primitives de données évolutives pour prendre en charge la formation politique de la simulation à la réalité.
#Comparaison des projets de couche de collecte de données intelligente incorporée

Perception et simulation (Middleware et simulation)
La couche de perception et de simulation fournit l’infrastructure de base permettant aux robots de connecter le monde physique et la prise de décision intelligente, notamment le positionnement, la communication, la modélisation spatiale, la formation par simulation et d’autres capacités. Il s’agit du « squelette de couche intermédiaire » pour la construction de systèmes intelligents incarnés à grande échelle.Actuellement, ce champ en est encore au premier stade d’exploration.Chaque projet a formé une configuration différenciée dans le sens du positionnement de haute précision, de l’informatique en espace partagé, de la standardisation des protocoles et de la simulation distribuée. Il n’existe pas encore de norme unifiée ni d’écosystème interopérable.
Intergiciel et amp;Infra spatiale
Les capacités essentielles des robots (navigation, positionnement, connectivité et modélisation spatiale) constituent un pont clé entre le monde physique et la prise de décision intelligente. Alors que les projets DePIN plus larges (Silencio, WeatherXM, DIMO) ont commencé à faire référence aux « robots », les projets suivants sont plus directement liés à l’intelligence incarnée.
#RoboStack – Pile d’exploitation de robots cloud-native
RoboStack est un middleware robotique cloud natif qui réalise la planification en temps réel, le contrôle à distance et l’interopérabilité multiplateforme des tâches robotisées via RCP (Robot Context Protocol), et fournit des fonctionnalités de simulation cloud, d’orchestration des flux de travail et d’accès aux agents.
#GEODNET – Réseau GNSS décentralisé
GEODNET est un réseau GNSS mondial décentralisé qui fournit un positionnement RTK de haute précision au niveau centimétrique. Grâce à des stations de base distribuées et à des incitations en chaîne, il fournit une « couche de référence géographique » en temps réel pour les drones, la conduite autonome et les robots.
#Auki – Posemesh pour le calcul spatial
Auki a construit un réseau informatique spatial Posemesh décentralisé qui génère des cartes d’environnement 3D en temps réel via des capteurs et des nœuds informatiques de crowdsourcing, fournissant une référence spatiale partagée pour la RA, la navigation robotisée et la collaboration multi-appareils.Il s’agit de l’infrastructure clé qui connecte l’espace virtuel et les scènes réelles, favorisant l’intégration de la RA × Robotique.
#Tashi Network — Réseau de collaboration en temps réel pour les robots
Réseau de grille décentralisé en temps réel pour obtenir un consensus inférieur à 30 ms, un échange de capteurs à faible latence et une synchronisation de l’état de plusieurs robots.Son SDK MeshNet prend en charge le SLAM partagé, la collaboration de groupe et les mises à jour cartographiques robustes, fournissant une couche de collaboration en temps réel hautes performances pour l’IA incarnée.
#Staex — un réseau décentralisé de connectivité et de télémétrie
Une couche de connectivité décentralisée provenant de la branche R&D de Deutsche Telekom fournit des communications sécurisées, une télémétrie fiable et des capacités de routage appareil vers cloud, permettant aux flottes de robots d’échanger des données et de collaborer de manière fiable entre différents opérateurs.
Système de simulation et de formation (Distributed Simulation & Learning)
#Dégradé – Vers une intelligence ouverte
Gradient est un laboratoire d’IA qui construit « l’intelligence ouverte » et s’engage à réaliser une formation, un raisonnement, une vérification et une simulation distribués basés sur une infrastructure décentralisée ; sa pile technologique actuelle comprend Parallax (raisonnement distribué), Echo (apprentissage par renforcement distribué et formation multi-agents) et Gradient Cloud (solutions d’IA pour les entreprises). Dans le domaine de la robotique, la plateforme Mirage offre une simulation distribuée, un environnement interactif dynamique et des capacités d’apprentissage parallèle à grande échelle pour la formation à l’intelligence incorporée afin d’accélérer la formation de modèles mondiaux et de stratégies générales.Mirage explore une potentielle collaboration avec NVIDIA sur son moteur Newton.
Couche de revenus des actifs du robot (RobotFi/RWAiFi)
Cette couche se concentre sur le maillon clé de la transformation des robots d’« outils productifs » en « actifs financiers » et construit l’infrastructure financière de l’économie machinique grâce à la tokenisation des actifs, à la distribution des revenus et à la gouvernance décentralisée.Les projets représentatifs comprennent :
#XmaquinaDAO – IA physique DAO
XMAQUINA est un écosystème décentralisé qui offre aux utilisateurs mondiaux des canaux de participation très liquides pour les meilleurs robots humanoïdes et les sociétés de renseignement incarné, apportant ainsi des opportunités qui n’étaient à l’origine disponibles qu’aux institutions de capital-risque.Son jeton DEUS est à la fois un actif indiciel liquide et un support de gouvernance, utilisé pour coordonner l’allocation de trésorerie et le développement écologique.Grâce au portail DAO et au Machine Economy Launchpad, la communauté peut organiser et soutenir conjointement des projets d’IA physique émergents grâce à la tokenisation des actifs machines et à une participation structurée en chaîne.
#GAIB – La couche économique pour l’infrastructure de l’IA
GAIB s’engage à fournir une couche économique unifiée pour les infrastructures physiques d’IA telles que les GPU et les robots, en connectant le capital décentralisé avec de véritables actifs d’infrastructure d’IA et en construisant un système économique intelligent vérifiable, composable et rentable.
Dans le sens des robots, GAIB ne « vend pas de tokens robots », mais réalise la transformation « flux de trésorerie réels → actifs à revenus composables sur la chaîne » en financiarisant les équipements des robots et les contrats d’exploitation (RaaS, collecte de données, opération à distance, etc.) sur la chaîne.Ce système couvre le financement du matériel (location financière/gage), les flux de trésorerie d’exploitation (RaaS/service de données) et les revenus des flux de données (licence/contrat), etc., rendant les actifs des robots et leurs flux de trésorerie mesurables, montables et négociables.
GAIB utilise l’AID/sAID comme moyen de règlement et de revenus, garantit des rendements stables grâce à des mécanismes structurés de contrôle des risques (surdimensionnement, réserves et assurance) et a un accès à long terme aux marchés de dérivés et de liquidité DeFi, formant une boucle financière fermée des « actifs robots » aux « actifs à revenus combinables ».L’objectif est de devenir l’épine dorsale économique de l’intelligence à l’ère de l’IA.
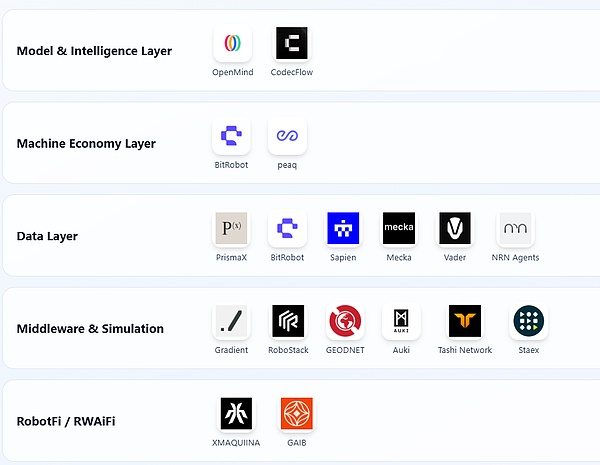
Carte écologique des robots Web3
Résumé et perspectives : défis réalistes et opportunités à long terme
Dans une perspective à long terme,Robot × IA × Web3L’intégration vise à construire un système économique de machines décentralisé (DeRobot Economy) et à promouvoir l’intelligence incorporée depuis « l’automatisation d’une seule machine » jusqu’à la collaboration en réseau avec « des droits confirmables, réglables et une gouvernance ». Sa logique fondamentale passe par « Tjeton → déploiement → données → redistribution de la valeur« Un mécanisme d’auto-circulation est formé pour permettre aux robots, aux capteurs et aux nœuds de puissance de calcul de confirmer les droits, d’échanger et de partager les bénéfices.
Toutefois, d’un point de vue pratique, ce modèle en est encore à ses débuts et est encore loin de former un flux de trésorerie stable et une boucle fermée commerciale à grande échelle.La plupart des projets restent au niveau narratif, avec un déploiement réel limité. La fabrication, l’exploitation et la maintenance de robots sont des secteurs à forte intensité de capital, et les incitations symboliques ne peuvent à elles seules soutenir l’expansion des infrastructures.Bien que la conception financière en chaîne soit composable, elle n’a pas encore résolu le problème de la tarification des risques et de la réalisation du rendement des actifs réels.Par conséquent, ce que l’on appelle « l’autocirculation du réseau de machines » reste idéale et son modèle commercial doit être vérifié dans la réalité.
-
Couche d’intelligence du modèle(Model & Intelligence Layer) est actuellement la direction ayant la plus grande valeur à long terme.Les systèmes d’exploitation de robots open source représentés par OpenMind tentent de briser l’écosystème fermé et d’unifier la collaboration multi-robots et les interfaces langage-action.Sa vision technique est claire et le système est complet, mais le volume du projet est énorme et le cycle de vérification est long, et il n’a pas encore formé de retour positif au niveau industriel.
-
couche d’économie de machine(Machine Economy Layer) en est encore au stade préliminaire. En réalité, le nombre de robots est limité et il est difficile pour le réseau d’identité et d’incitation de DID de former un cycle auto-cohérent.Nous sommes encore loin d’une « économie du travail-machine ».À l’avenir, ce n’est que lorsque l’intelligence incarnée sera déployée à grande échelle que les effets économiques des réseaux d’identité, d’établissement et de collaboration en chaîne émergeront véritablement.
-
Couche de collecte de données(Couche de données) La couche de collecte de données a le seuil le plus bas, mais elle est actuellement la plus proche de la faisabilité commerciale.La collecte de données intelligentes incarnées nécessite une continuité spatio-temporelle et une précision sémantique des actions extrêmement élevées, ce qui détermine sa qualité et sa réutilisabilité.Comment équilibrer « l’échelle du crowdsourcing » et la « fiabilité des données » est un défi majeur dans l’industrie.PrismaX cible d’abord les besoins du côté B, puis distribue la collecte et la vérification des tâches pour fournir des modèles reproductibles dans une certaine mesure, mais l’échelle écologique et les transactions de données nécessitent encore du temps pour s’accumuler.
-
Couche de perception et de simulation(Middleware et couche de simulation) Il est encore en période de vérification technique et manque de normes et d’interfaces unifiées pour former un écosystème interopérable.Les résultats de simulation sont difficiles à standardiser et à transférer dans l’environnement réel, et l’efficacité de Sim2Real est limitée.
-
couche de revenu d’actifs(RobotFi / RWAiFi) Web3 joue principalement un rôle auxiliaire dans le financement de la chaîne d’approvisionnement, le crédit-bail d’équipements et la gouvernance des investissements, améliorant la transparence et l’efficacité des règlements, plutôt que de remodeler la logique industrielle.
Bien entendu, nous pensons que l’intersection Robots × IA × Web3 représente toujours l’origine de la prochaine génération de systèmes économiques intelligents.Il ne s’agit pas seulement d’une fusion de paradigmes techniques, mais aussi d’une opportunité de reconstruire les relations de production : lorsque les machines auront des identités, des incitations et des mécanismes de gouvernance, la collaboration homme-machine passera d’une automatisation partielle à une autonomie en réseau.À court terme, cette orientation est encore dominée par le récit et l’expérimentation, mais le cadre institutionnel et incitatif qu’elle a mis en place pose les bases de l’ordre économique de la future société machinique.Dans une perspective à long terme, la combinaison de l’intelligence incarnée et du Web3 redéfinira les limites de la création de valeur, faisant des agents intelligents des entités économiques véritablement identifiables, collaboratives et rentables.