Autor: Jacob Zhao @IOSG
Roboterpanorama: Von der industriellen Automatisierung zur humanoiden Intelligenz
Die traditionelle Roboterindustriekette hat von unten nach oben ein vollständiges Schichtsystem gebildet, das abdecktKernkomponenten – Zwischensteuerungssystem – komplette Maschinenherstellung – AnwendungsintegrationVier wichtige Links.Kernkomponenten(Controller, Servo, Untersetzungsgetriebe, Sensor, Batterie usw.) Die technische Barriere ist die höchste und bestimmt die Untergrenze der Gesamtleistung und -kosten der Maschine.SteuerungssystemEs ist das „Gehirn und Kleinhirn“ des Roboters, verantwortlich für Entscheidungsfindung, Planung und Bewegungssteuerung;Kompletter MaschinenbauReflektieren Sie die Fähigkeiten zur Supply-Chain-Integration.Systemintegration und -anwendungDie Bestimmung der Kommerzialisierungstiefe wird zum neuen Kern der Wertschöpfung.
Je nach Anwendungsszenario und -form folgen globale Roboter dem „Industrielle Automatisierung → Szenario-Intelligenz → Allgemeine Intelligenz„Die Pfadentwicklung hat fünf Haupttypen gebildet:Industrieroboter, mobile Roboter, Serviceroboter, Spezialroboter und humanoide Roboter
#Industrieroboter(Industrieroboter)
Derzeit ist es die einzige umfassende und ausgereifte Spur und wird häufig in Fertigungsprozessen wie Schweißen, Montage, Spritzen und Handhabung eingesetzt. Die Branche hat ein standardisiertes Lieferkettensystem mit stabiler Bruttogewinnspanne und klarem ROI geschaffen. Eine der Unterkategorien, kollaborative Roboter (Cobots), legt den Schwerpunkt auf die Zusammenarbeit zwischen Mensch und Maschine, ist leichtgewichtig und einfach zu implementieren und wächst am schnellsten.
Repräsentatives Unternehmen:ABB, Fanuc, Yaskawa, KUKA, Universal Robots, Jieka, Aobo.
#mobiler Roboter(Mobile Roboter)
Einschließlich AGV (Automatic Guided Vehicle) und AMR (Autonomous Mobile Robot) wurden sie in großem Umfang in der Lagerlogistik, im E-Commerce-Vertrieb und im Produktionstransport eingesetzt und haben sich zu den ausgereiftesten Kategorien auf der B-Seite entwickelt.
Repräsentatives Unternehmen: Amazon Robotics, Geek+, Quicktron, Locus Robotics.
#Serviceroboter(Serviceroboter)
Es ist der am schnellsten wachsende Bereich auf der Verbraucherseite, der auf Branchen wie Reinigung, Gastronomie, Hotellerie und Bildung abzielt.Reinigungsprodukte sind in der Logik der Unterhaltungselektronik angekommen, und der medizinische und kommerzielle Vertrieb beschleunigt die Kommerzialisierung. Darüber hinaus entstehen eine Reihe allgemeiner einsetzbarer Operationsroboter (wie das Doppelarmsystem von Dyna) – flexibler als aufgabenspezifische Produkte, aber noch nicht so vielseitig wie humanoide Roboter.
Repräsentatives Unternehmen: Ecovacs, Roborock Technology, Pudu Technology, Qinglang Intelligence, iRobot, Dyna usw.
#Spezialroboter
Es bedient hauptsächlich Szenarien wie medizinische Versorgung, Militärindustrie, Bauwesen, Schifffahrt und Luft- und Raumfahrt. Die Marktgröße ist begrenzt, aber die Gewinnspanne ist hoch und die Barrieren sind stark.Es stützt sich hauptsächlich auf Regierungs- und Unternehmensaufträge und befindet sich in der Wachstumsphase der vertikalen Segmentierung.Zu den typischen Projekten gehören:Intuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie und mehr.
#humanoider Roboter(Humanoide Roboter)
Gilt als die „universelle Workforce-Plattform“ der Zukunft.
Repräsentatives Unternehmen:Tesla (Optimus), Figure AI (Abbildung 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree, UBTECH, Zhiyuan Robot usw.
Humanoide Roboter sind die Grenzrichtung, die derzeit die größte Aufmerksamkeit auf sich zieht. Ihr Kernwert liegt in der Anpassung humanoider Strukturen an bestehende soziale Räume und gilt als Schlüsselform für eine „universelle Arbeitsplattform“.Im Gegensatz zu Industrierobotern, die nach extremer Effizienz streben, legen humanoide Roboter Wert daraufAllgemeine Anpassungsfähigkeit und Aufgabenübertragbarkeit, können Fabriken, Häuser und öffentliche Räume betreten, ohne die Umgebung zu verändern.
Derzeit stecken die meisten humanoiden Roboter noch festTechnologiedemonstrationsbühneDabei werden hauptsächlich das dynamische Gleichgewicht sowie die Geh- und Bedienfähigkeiten überprüft.Obwohl es bereits einige Projekte gibtstark kontrolliertKleinere Einsätze (wie Figure × BMW, Agility Digit) haben in Werksszenarien begonnen, und es wird erwartet, dass ab 2026 weitere Hersteller (wie 1X) in den frühen Vertrieb eintreten werden, aber das ist noch nicht der FallEingeschränkte Anwendung von „schmale Szene, Einzelaufgabe“, und nicht die Einführung einer universellen Arbeitskraft im eigentlichen Sinne.Insgesamt wird es bis zur großflächigen Kommerzialisierung noch einige Jahre dauern. Zu den wichtigsten Engpässen gehören: Kontrollprobleme wie die Koordination mit mehreren Freiheitsgraden und das dynamische Gleichgewicht in Echtzeit;Probleme mit dem Energieverbrauch und der Batterielebensdauer werden durch die Energiedichte der Batterie und die Fahreffizienz begrenzt;Wahrnehmungs-Entscheidungsverbindungen, die anfällig für Instabilität sind und in einer offenen Umgebung schwer zu verallgemeinern sind; erhebliche Datenlücken (es ist schwierig, ein allgemeines Strategietraining zu unterstützen);Die Cross-Body-Migration ist noch nicht überwunden; und Hardware-Lieferketten und Kostenkurven (insbesondere außerhalb Chinas) stellen immer noch realistische Schwellenwerte dar, was es schwieriger macht, einen groß angelegten, kostengünstigen Einsatz zu erreichen.
Der zukünftige Kommerzialisierungspfad wird voraussichtlich drei Phasen durchlaufen: kurzfristig undDemo-as-a-ServiceHauptsächlich auf Pilotprojekte und Subventionen angewiesen;Mittelfristig wird es sich weiterentwickelnRobotik-as-a-Service (RaaS), eine Ökologie von Aufgaben und Fähigkeiten aufbauen; langfristigWorkforce-CloudmitIntelligenter AbonnementdienstAls Kernstück fördern wir die Verlagerung des Wertschöpfungsschwerpunkts von der Hardwarefertigung hin zu Software- und Servicenetzwerken. Im Allgemeinen befinden sich humanoide Roboter in einer kritischen Übergangsphase von der Demonstration zum Selbstlernen. Ob sie in Zukunft die dreifache Schwelle aus Kontrolle, Kosten und Algorithmus überschreiten können, wird darüber entscheiden, ob sie tatsächlich verkörperte Intelligenz realisieren können.
KI × Roboter: Der Beginn der Ära der verkörperten Intelligenz
Die herkömmliche Automatisierung basiert hauptsächlich auf Vorprogrammierung und Pipeline-Steuerung (wie die DSOP-Architektur von Sensing-Planning-Control) und kann nur in einer strukturierten Umgebung zuverlässig ausgeführt werden.Die reale Welt ist komplexer und veränderlicher, und die neue Generation der verkörperten Intelligenz (verkörperte KI) folgt einem anderen Paradigma: Durch große Modelle und einheitliches Repräsentationslernen haben Roboter die Fähigkeit, szenarioübergreifend „zu verstehen, vorherzusagen und zu handeln“.Schwerpunkt auf verkörperter IntelligenzKörper (Hardware) + Gehirn (Modell) + Umgebung (Interaktion)Dynamische Kopplung, der Roboter ist der Träger und Intelligenz ist der Kern.
Generative KI gehört dazuIntelligenz in der Welt der Sprache, gut im Verständnis von Symbolen und Semantik; Verkörperte KI gehört dazuIntelligenz aus der realen Welt, Wahrnehmung und Handeln beherrschen.Die beiden entsprechen „Gehirn“ bzw. „Körper“ und repräsentieren zwei parallele Hauptlinien der KI-Evolution.Aus Sicht der Intelligenz ist die verkörperte Intelligenz weiter fortgeschritten als die generative KI, ihre Reife liegt jedoch noch deutlich zurück. LLM stützt sich auf den riesigen Korpus des Internets, um einen klaren geschlossenen Kreislauf aus „Daten → Rechenleistung → Bereitstellung“ zu bilden;während Roboterintelligenz erfordertErste Perspektive, multimodal, Daten stark an Aktionen gebunden——Einschließlich ferngesteuerter Flugbahnen, Videos aus der Ego-Perspektive, räumlichen Karten, Betriebssequenzen usw. Diese DatenKommt natürlicherweise nicht vor, müssen durch echte Interaktion oder High-Fidelity-Simulation generiert werden und sind daher seltener und teurer.Obwohl Simulationen und synthetische Daten hilfreich sind, können sie echte Sensor-Bewegungserfahrungen dennoch nicht ersetzen. Aus diesem Grund müssen Tesla, Figure usw. ihre eigenen ferngesteuerten Datenfabriken aufbauen, und auch aus diesem Grund entstehen in Südostasien Datenanmerkungsfabriken von Drittanbietern.Kurz gesagt:LLM lernt aus leicht verfügbaren Daten, während Roboter Daten durch Interaktion mit der physischen Welt „erschaffen“ müssen. In den nächsten 5 bis 10 Jahren werden die beiden tief in das Vision-Sprache-Aktion-Modell und die Architektur des verkörperten Agenten integriert – LLM ist für die Erkenntnis und Planung auf hoher Ebene verantwortlich, und der Roboter ist für die Ausführung in der realen Welt verantwortlich.Dadurch entsteht ein wechselseitiger geschlossener Kreislauf aus Daten und Aktionen, der gemeinsam die KI von „linguistischer Intelligenz“ zur realen fördertAllgemeine Intelligenz (AGI).
Das Kerntechnologiesystem der verkörperten Intelligenz kann als Bottom-up-Intelligenzstapel betrachtet werden:VLA (Wahrnehmungsfusion), RL/IL/SSL (intelligentes Lernen), Sim2Real (Realitätstransfer), Weltmodell (kognitive Modellierung) und Multi-Agenten-Zusammenarbeit und Gedächtnisschlussfolgerung (Swarm & Reasoning). Unter ihnen sind VLA und RL/IL/SSL die „Motoren“ der verkörperten Intelligenz, die ihre Implementierung und Kommerzialisierung bestimmen; Sim2Real und World Model sind Schlüsseltechnologien, die virtuelles Training und reale Ausführung verbinden; Multi-Agenten-Zusammenarbeit und Gedächtnisschluss repräsentieren Gruppen- und metakognitive Evolution auf höherer Ebene.

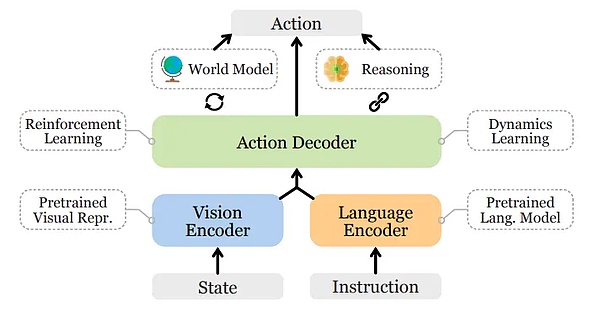
Wahrnehmungsverständnis: Vision–Sprache–Aktionsmodell (Vision–Sprache–Aktion)
Das VLA-Modell integriertVision – Sprache – AktionDrei Kanäle ermöglichen es dem Roboter, Absichten aus der menschlichen Sprache zu verstehen und in spezifisches Bedienverhalten zu übersetzen.Sein Ausführungsprozess umfasst semantische Analyse, Zielerkennung (Lokalisierung von Zielobjekten anhand visueller Eingaben), Pfadplanung und Aktionsausführung, wodurch ein geschlossener Kreislauf aus „Semantik verstehen – Welt wahrnehmen – Aufgaben erledigen“ erreicht wird, was einen der wichtigsten Durchbrüche in der verkörperten Intelligenz darstellt. Zu den aktuellen repräsentativen Projekten zählen:Google RT-X, Meta Ego-Exo und Figure Helix, bzw. demonstrieren modernste Richtungen wie modalübergreifendes Verständnis, immersive Wahrnehmung und sprachgesteuerte Kontrolle.
Derzeit befindet sich VLA noch in einem frühen Stadium und steht vor vier zentralen Engpässen:
-
Semantische Mehrdeutigkeit und schwache Aufgabengeneralisierung: Models haben Schwierigkeiten, vage, offene Anweisungen zu verstehen;
-
Instabile Ausrichtung von Sicht und Bewegung: Wahrnehmungsfehler werden bei der Pfadplanung und -ausführung verstärkt;
-
Multimodale Daten sind rar und Standards sind inkonsistent: Die Kosten für die Sammlung und Kennzeichnung sind hoch, was die Bildung eines groß angelegten Datenschwungrads erschwert.
-
Zeitachsen- und Raumachsenherausforderungen langfristiger Aufgaben: Eine zu lange Aufgabenspanne führt zu unzureichenden Planungs- und Gedächtnisfähigkeiten, während ein zu großer räumlicher Bereich das Modell dazu zwingt, über Dinge „außerhalb des Sichtfelds“ nachzudenken.Dem aktuellen VLA fehlen stabile Weltmodelle und raumübergreifende Argumentationsfähigkeiten.
Diese Probleme schränken gemeinsam die Fähigkeit zur szenarioübergreifenden Generalisierung und den groß angelegten Implementierungsprozess von VLA ein.
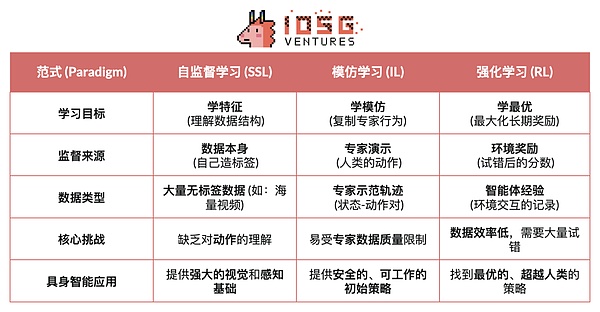
Intelligentes Lernen: selbstüberwachtes Lernen (SSL), Nachahmungslernen (IL) und verstärkendes Lernen (RL)
-
Selbstüberwachtes Lernen(Selbstüberwachtes Lernen): Extrahieren Sie automatisch semantische Merkmale aus sensorischen Daten, damit Roboter „die Welt verstehen“ können.Es ist gleichbedeutend damit, die Maschine lernen zu lassenBeobachtung und Darstellung.
-
Nachahmungslernen(Imitation Learning): Erlernen Sie schnell Grundfertigkeiten, indem Sie menschliche Demonstrationen oder Expertenbeispiele nachahmen.Es ist gleichbedeutend damit, die Maschine lernen zu lassensich wie ein Mensch verhalten.
-
Verstärkungslernen(Reinforcement Learning): Durch den „Belohnungs-Strafe“-Mechanismus optimiert der Roboter seine Aktionsstrategie durch kontinuierliches Ausprobieren.Es ist gleichbedeutend damit, die Maschine lernen zu lassenWachsen Sie durch Versuch und Irrtum.
Bei der verkörperten KI zielt das selbstüberwachte Lernen (SSL) darauf ab, Robotern zu ermöglichen, Zustandsänderungen und physikalische Gesetze anhand sensorischer Daten vorherzusagen und so die kausale Struktur der Welt zu verstehen; Reinforcement Learning (RL) ist der Kernmotor der Intelligenzbildung und bringt Roboter dazu, komplexe Verhaltensweisen wie Gehen, Greifen und Vermeiden von Hindernissen durch Interaktion mit der Umgebung und Trial-and-Error-Optimierung auf der Grundlage von Belohnungssignalen zu meistern;Imitation Learning (IL) beschleunigt diesen Prozess durch menschliche Demonstration und ermöglicht es Robotern, sich schnell Handlungsvorgaben anzueignen.Die aktuelle Mainstream-Richtung besteht darin, die drei zu kombinieren, um ein hierarchisches Lerngerüst aufzubauen: SSL bietet eine Repräsentationsbasis, IL gibt menschlichen Prioritäten und RL treibt die Richtlinienoptimierung voran, um Effizienz und Stabilität in Einklang zu bringen, die zusammen den Kernmechanismus der verkörperten Intelligenz vom Verstehen bis zum Handeln bilden.
Realitätsmigration: Sim2Real – der Sprung von der Simulation zur Realität
Sim2Real(Simulation to Reality) soll es Robotern ermöglichen, das Training in einer virtuellen Umgebung zu absolvieren und dann in die reale Welt zu migrieren.Es verwendet High-Fidelity-Simulationsumgebungen wieNVIDIA Isaac Sim & Omniverse, DeepMind MuJoCo) generiert umfangreiche interaktive Daten und reduziert so die Schulungskosten und den Hardware-Verschleiß erheblich.Sein Kern ist die Reduzierung der „simulierte RealitätslückeZu den wichtigsten Methoden gehören:
-
Domänenrandomisierung(Domänen-Randomisierung): Passen Sie Beleuchtung, Reibung, Rauschen und andere Parameter während der Simulation nach dem Zufallsprinzip an, um die Fähigkeit zur Modellverallgemeinerung zu verbessern.
-
Kalibrierung der physikalischen Konsistenz: Verwenden Sie reale Sensordaten, um die Simulations-Engine zu kalibrieren und so die physikalische Wiedergabetreue zu verbessern.
-
Adaptive Feinabstimmung(Adaptive Feinabstimmung): Schnelles Umschulen in realen Umgebungen, um eine stabile Migration zu erreichen.
Sim2Real ist das zentrale Bindeglied bei der Implementierung verkörperter Intelligenz und ermöglicht es KI-Modellen, den geschlossenen Kreislauf von „Wahrnehmung-Entscheidungs-Kontrolle“ in einer sicheren und kostengünstigen virtuellen Welt zu erlernen.Sim2Real ist im Simulationstraining ausgereift (wie NVIDIA Isaac Sim, MuJoCo), aber die Realitätsmigration wird immer noch durch Reality Gap, hohe Rechenleistung und Kennzeichnungskosten sowie unzureichende Generalisierung und Sicherheit in einer offenen Umgebung begrenzt.Dennoch entwickelt sich Simulation-as-a-Service (SimaaS) zur leichtesten, aber strategisch wertvollsten Infrastruktur im Zeitalter der verkörperten Intelligenz.Das Geschäftsmodell umfasst Plattformabonnement (PaaS), Datengenerierung (DaaS) und Sicherheitsüberprüfung (VaaS).
Kognitive Modellierung: Weltmodell – die „innere Welt“ des Roboters
Weltmodell(Weltmodell) ist das „innere Gehirn“ der verkörperten Intelligenz, das es Robotern ermöglicht, die Umgebung und Handlungskonsequenzen intern zu simulieren, um Vorhersagen und Überlegungen zu treffen.Durch das Erlernen der dynamischen Gesetze der Umgebung wird eine vorhersehbare interne Darstellung erstellt, die es dem Agenten ermöglicht, die Ergebnisse vor der Ausführung „vorauszuschauen“ und sich so von einem passiven Ausführenden zu einem aktiven Denker zu entwickeln.Zu den repräsentativen Projekten gehören DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim usw. Zu den typischen Technologiepfaden gehören:
-
Modellierung latenter Variablen(Latent Dynamics Modeling): Hochdimensionale Wahrnehmung in den latenten Zustandsraum komprimieren;
-
Vorstellungskrafttraining für die Vorhersage von Zeitreihen(Imaginationsbasierte Planung): Virtuelles Ausprobieren und Pfadvorhersage im Modell;
-
Modellgesteuertes Verstärkungslernen(Modellbasiertes RL): Ersetzen Sie die reale Umgebung durch ein Weltmodell, um die Schulungskosten zu senken.
Das Weltmodell steht theoretisch an der Spitze der verkörperten Intelligenz und ist der zentrale Weg für Roboter, von „reaktiver“ zu „prädiktiver“ Intelligenz zu gelangen.Allerdings wird es immer noch durch Herausforderungen wie komplexe Modellierung, instabile Langzeitvorhersagen und das Fehlen einheitlicher Standards eingeschränkt.
Schwarmintelligenz und Gedächtnisdenken: vom individuellen Handeln bis zum kollaborativen Erkennen
Multiagentensysteme und Gedächtnis und Argumentation stellen zwei wichtige Richtungen in der Entwicklung der verkörperten Intelligenz von „individueller Intelligenz“ zu „Gruppenintelligenz“ und „kognitiver Intelligenz“ dar. Gemeinsam unterstützen die beiden das intelligente Systemkollaboratives Lernenmitlangfristige AnpassungFähigkeit.
#Multi-Agenten-Kollaboration (Swarm/Cooperative RL):
Es bezieht sich auf die Realisierung kollaborativer Entscheidungsfindung und Aufgabenzuweisung durch mehrere Agenten in einer gemeinsamen Umgebung durch verteiltes oder kollaboratives Verstärkungslernen.Es gibt eine solide Forschungsgrundlage in dieser Richtung, wie zDas OpenAI-Hide-and-Seek-Experiment demonstriert die spontane Zusammenarbeit und Strategieentwicklung mit mehreren Agenten sowie die Algorithmen DeepMind QMIX und MADDPGBietet einen kollaborativen Rahmen für zentralisierte Schulungen und dezentrale Ausführung.Diese Art von Methode wurde in Szenarien wie der Planung, Inspektion und Clustersteuerung von Lagerrobotern angewendet und verifiziert.
#Gedächtnis und Argumentation
Die Konzentration auf die Ausstattung von Agenten mit Langzeitgedächtnis, Situationsverständnis und kausalen Argumentationsfähigkeiten ist eine Schlüsselrichtung für die Erzielung einer aufgabenübergreifenden Übertragung und Selbstplanung.typischDie Forschung umfasst DeepMind Gato (einheitlicher Multitasking-Agent für Wahrnehmung, Sprachsteuerung) und DeepMind Dreamer (phantasievolle Planung basierend auf einem Weltmodell) sowie offene verkörperte Agenten wie Voyager, die externes Gedächtnis nutzenErreichen Sie kontinuierliches Lernen durch Selbstentwicklung.Diese Systeme legen den Grundstein dafür, dass Roboter die Fähigkeit haben, sich „an die Vergangenheit zu erinnern und auf die Zukunft zu schließen“.
Globale Branchenlandschaft für verkörperte Intelligenz: Kooperation und Wettbewerb existieren nebeneinander

Die globale Roboterindustrie befindet sich in einer Phase der „Kooperation und Vertiefung des Wettbewerbs“.Chinas Lieferketteneffizienz, die KI-Fähigkeiten der USA, Japans Teilepräzision und Europas Industriestandards werden gemeinsam das langfristige Muster der globalen Roboterindustrie prägen.
-
Vereinigte StaatenBleiben Sie bei modernsten KI-Modellen und Software (DeepMind, OpenAI, NVIDIA) immer einen Schritt voraus, aber dieser Vorteil erstreckt sich nicht auf Robotik-Hardware. Chinesische Hersteller haben größere Vorteile bei der Iterationsgeschwindigkeit und der Leistung in realen Szenen.Die Vereinigten Staaten haben die Rückverlagerung von Industrien durch den CHIPS Act und den Inflation Reduction Act (IRA) gefördert.
-
ChinaDurch die Nutzung von Großserienfertigung, vertikaler Integration und politikgesteuerter Entwicklung hat das Unternehmen führende Vorteile in den Bereichen Teile, automatisierte Fabriken und humanoide Roboter geschaffen und verfügt über hervorragende Hardware- und Lieferkettenfähigkeiten.Yushu und UBTECH haben die Massenproduktion erreicht und erstrecken sich auf die Ebene der intelligenten Entscheidungsfindung. Allerdings besteht zwischen China und den Vereinigten Staaten immer noch eine große Lücke in Bezug auf Algorithmen und Simulationstraining.
-
JapanEs verfügt über ein langfristiges Monopol auf hochpräzise Komponenten und Bewegungssteuerungstechnologie und sein Industriesystem ist stabil.Allerdings befindet sich die Integration von KI-Modellen noch in einem frühen Stadium und das Innovationstempo ist relativ stabil.
-
SüdkoreaEs ist herausragend bei der Popularisierung von Verbraucherrobotern – angeführt von Unternehmen wie LG und NAVER Labs – und verfügt über ein ausgereiftes und starkes Serviceroboter-Ökosystem.
-
EuropaDas technische System und die Sicherheitsstandards sind vollständig, und 1X Robotics und andere sind weiterhin auf Forschungs- und Entwicklungsebene aktiv, einige Produktionsverbindungen wurden jedoch verlagert, und der Schwerpunkt der Innovation liegt auf Zusammenarbeit und Standardisierung.
Roboter × KI × Web3: Narrative Vision und realistischer Weg
Im Jahr 2025 entsteht in der Web3-Branche ein neues Narrativ, das mit Bots und KI verschmilzt.Obwohl Web3 als das zugrunde liegende Protokoll der dezentralen Maschinenwirtschaft gilt, sind sein kombinierter Wert und seine Machbarkeit auf verschiedenen Ebenen immer noch klar differenziert:
-
Hardware-Fertigungs- und ServiceschichtWeb3 ist kapitalintensiv und hat einen schwachen Datenkreislauf. Derzeit kann es nur eine unterstützende Rolle bei Edge-Links wie der Lieferkettenfinanzierung oder dem Leasing von Geräten spielen.
-
Simulations- und Software-ÖkosystemschichtDer Grad der Kompatibilität ist hoch. Zur Bestätigung der Rechte können Simulationsdaten und Trainingsaufgaben in die Kette hochgeladen werden. Auch Agenten und Skill-Module können über verifiziert werdenNFT oder Agent-TokenGroßschreibung realisieren;
-
Plattformschicht, dezentrale Arbeits- und Kooperationsnetzwerke zeigen ihr größtes Potenzial – Web3 kann durch einen integrierten Mechanismus aus Identität, Anreizen und Governance schrittweise einen glaubwürdigen „Maschinenarbeitsmarkt“ aufbauen und so den institutionellen Prototyp für die zukünftige Maschinenwirtschaft legen.

Aus langfristiger Sicht istKollaborations- und PlattformschichtEs ist die wertvollste Richtung bei der Integration von Web3, Robotern und KI.Während Roboter nach und nach Wahrnehmungs-, Sprach- und Lernfähigkeiten erwerben, entwickeln sie sich zu intelligenten Individuen, die in der Lage sind, autonome Entscheidungen zu treffen, zusammenzuarbeiten und wirtschaftlichen Wert zu schaffen. Diese „intelligenten Arbeiter“ müssen noch vier Grenzen überschreiten, um wirklich am Wirtschaftssystem teilzunehmen.Identität, Vertrauen, Anreize und GovernanceKernschwelle.
-
inIdentitätsschicht, muss die Maschine eine überprüfbare und nachvollziehbare digitale Identität haben.passierenDurch maschinelles DID,Jeder Roboter, Sensor oder jede Drohne kann in der Kette eine eindeutige und überprüfbare „ID-Karte“ generieren, die seinen Besitz, seine Verhaltensaufzeichnungen und seinen Autoritätsbereich bindet, um eine sichere Interaktion und Definition von Verantwortlichkeiten zu gewährleisten.
-
inVertrauensschichtDer Schlüssel liegt darin, „Maschinenarbeit“ nachweisbar, messbar und messbar zu machenPreise.Mit Hilfe von Smart Contracts, Oracles und Audit-Mechanismen, kombiniert mit Proof of Physical Work (PoPW), Trusted Execution Environment (TEE) und Zero-Knowledge Proof (ZKP), kann die Authentizität und Nachvollziehbarkeit des Aufgabenausführungsprozesses sichergestellt und das Maschinenverhalten empirisch gemacht werden.Wirtschaftlicher Buchwert.
-
inAnreizschicht, Web3 bestehtToken-Anreizsystem, Kontoabstraktion und StatuskanalRealisieren Sie die automatische Abrechnung und Wertübertragung zwischen Maschinen. Roboter können die Vermietung von Rechenleistung und den Datenaustausch durch Mikrozahlungen abschließen und Verpfändungs- und Strafmechanismen nutzen, um die Aufgabenerfüllung sicherzustellen;Mit Hilfe von Smart Contracts und Oracles kann zudem ein dezentraler „Machine Collaboration Market“ entstehen, der keine manuelle Planung erfordert.
-
inRegierungsführungWenn die Maschine über langfristige Autonomiefähigkeiten verfügt, bietet Web3 ein transparentes und programmierbares Governance-Framework:Verwenden Sie DAO, um Systemparameter für die gemeinsame Entscheidungsfindung zu steuern und Sicherheit und Ordnung mit Multisignatur- und Reputationsmechanismen aufrechtzuerhalten.Langfristig wird dies die Maschinengesellschaft in die Phase der „algorithmischen Governance“ treiben – Menschen setzen Ziele und Grenzen, und Maschinen nutzen Verträge, um Anreize und Gleichgewicht aufrechtzuerhalten.
Die ultimative Vision für die Integration von Web3 und Robotern: ein Netzwerk zur Bewertung realer Umgebungen——Eine „Real-World Reasoning Engine“, bestehend aus verteilten Robotern, die die Modellfähigkeiten in verschiedenen und komplexen physikalischen Szenarien kontinuierlich testet und bewertet;undRoboterarbeitsmarkt——Roboter führen weltweit nachweisbare Aufgaben im echten Leben aus, erzielen Gewinne durch die Abwicklung in der Kette und investieren den Wert wieder in Rechenleistung oder Hardware-Upgrades.
Aus praktischer Sicht befindet sich die Kombination von verkörperter Intelligenz und Web3 noch im frühen Forschungsstadium, und die dezentrale maschinelle Intelligenzökonomie bleibt eher auf der narrativen und gemeinschaftsgesteuerten Ebene. In der Realität spiegeln sich die Kombinationsrichtungen mit realisierbarem Potenzial hauptsächlich in den folgenden drei Aspekten wider:
(1)Daten-Crowdsourcing und Rechtebestätigung——Web3 ermutigt Mitwirkende, reale Daten durch Anreiz- und Rückverfolgbarkeitsmechanismen in der Kette hochzuladen;
(2)Globale Long-Tail-Beteiligung——Grenzüberschreitende Mikrozahlungen und Mikroanreizmechanismen reduzieren wirksam die Kosten für die Datenerfassung und -verteilung;
(3)Finanzialisierung und kollaborative Innovation——Das DAO-Modell kann die Assetisierung von Robotern, die Gutscheinisierung von Einkommen und den Abrechnungsmechanismus zwischen Maschinen fördern.
Insgesamt liegt das Hauptaugenmerk kurzfristig aufDatenerfassungs- und Anreizschicht;Mittelfristig wird erwartet, dass „Stabile Währungszahlung + Long-Tail-Datenaggregation„UndRaaS-Assetisierungs- und AbrechnungsschichtDurchbrüche erzielen; auf lange Sicht, wenn humanoide Roboter in großem Umfang populär gemacht werden,Web3 könnte zum zugrunde liegenden System für Maschinenbesitz, Umsatzverteilung und Governance werden, um die Bildung einer wirklich dezentralen Maschinenwirtschaft zu fördern.
Ökologische Karte des Web3-Roboters und ausgewählte Fälle
Sortieren Sie den aktuellen Stand anhand der drei Kriterien „nachweisbarer Fortschritt, Technologieoffenheit und Branchenrelevanz“.Web3 × RobotikRepräsentative Projekte, klassifiziert nach der fünfschichtigen Struktur:Modellintelligenzschicht, Maschinenwirtschaftsschicht, Datenerfassungsschicht, Wahrnehmungs- und Simulationsbasisschicht und Robotervermögenseinkommensschicht. Um objektiv zu bleiben, haben wir offensichtliche „Hot Spots“ oder Punkte mit unzureichenden Informationen eliminiert; Sollten Auslassungen vorhanden sein, korrigieren Sie uns bitte.

Modell & Intelligenz
#Openmind – Android für Roboter entwickeln
OpenMindEs handelt sich um ein Open-Source-Betriebssystem (Robot OS) für verkörperte Intelligenz (Embodied AI) und Robotersteuerung.Ziel ist der Aufbau der weltweit ersten dezentralen Roboterbetriebsumgebung und Entwicklungsplattform. Der Kern des Projekts besteht aus zwei Hauptkomponenten:
-
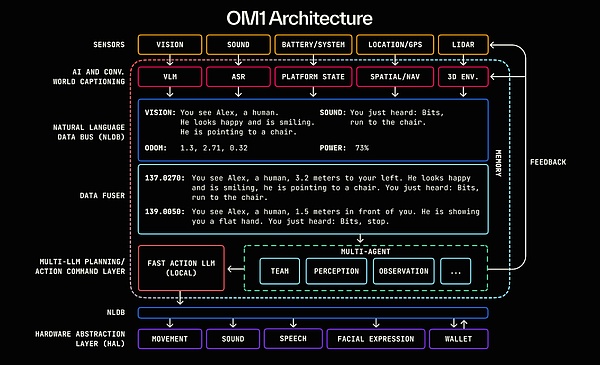
OM1: Eine modulare Open-Source-KI-Laufzeitschicht auf Basis von ROS2, die zur Orchestrierung von Wahrnehmungs-, Planungs- und Aktionspipelines verwendet wird und digitale und physische Roboter bedient;
-
STOFF: Die verteilte Koordinationsschicht (Fabric Coordination Layer) verbindet Cloud-Computing-Leistung, Modelle und reale Roboter und ermöglicht es Entwicklern, Roboter in einer einheitlichen Umgebung zu steuern und zu trainieren.
Im Kern dient OpenMind alsEine intelligente Mittelschicht zwischen LLM (Large Language Model) und der RoboterweltDadurch kann sich die sprachliche Intelligenz wirklich in verkörperte Intelligenz (verkörperte Intelligenz) verwandeln und darauf aufbauenVerstehen (Sprache → Aktion)AnkommenAusrichtung (Blockchain → Regeln)intelligentes Skelett.
Das mehrschichtige OpenMind-System erreicht einen vollständigen kollaborativen geschlossenen Kreislauf: Menschen passierenOpenMind App stellt Feedback und Anmerkungen (RLHF-Daten) bereit und Fabric Network ist dafür verantwortlichAuthentifizierungs-, Aufgabenzuweisungs- und AbrechnungsprotokolleTune, OM1 Robots führt die Aufgabe ausDienstleistungen und befolgen Sie die „Roboterkonstitution“ auf der Blockchain, um Verhaltensprüfungen und Zahlungen durchzuführen und so etwas zu erreichenMenschliches Feedback → Zusammenarbeit bei Aufgaben → Abwicklung in der KetteEin dezentrales Maschinenkollaborationsnetzwerk.

Projektfortschritt und realistische Bewertung
OpenMind befindet sich im Anfangsstadium von „technologisch einsatzbereit, aber kommerziell nicht verfügbar“. KernsystemOM1 Runtime wurde als Open Source auf GitHub bereitgestellt.Es kann auf mehreren Plattformen ausgeführt werden und unterstützt multimodale Eingaben. Es realisiert das Verstehen von Sprach-zu-Aktions-Aufgaben über den Natural Language Data Bus (NLDB). Es ist sehr originell, aber dennoch experimentell. Stoffnetzwerk und KetteDie Besiedlung vervollständigt lediglich das Design der Schnittstellenschicht.
Ökologisch gesehen hat das ProjektOffene Hardware wie Unitree, Ubtech, TurtleBot und Stanford, Oxford, Seoul RoboticsDie Zusammenarbeit mit anderen Universitäten dient hauptsächlich der Verifizierung von Bildung und Forschung und ist noch nicht industrialisiert.Die App befindet sich derzeit in der Beta-Phase, die Anreiz- und Aufgabenfunktionen befinden sich jedoch noch im Anfangsstadium.
In Bezug auf das Geschäftsmodell hat OpenMind aufgebautOM1 (Open-Source-System) + Fabric (Abrechnungsprotokoll) + Skill Marketplace (Anreizschicht)Das dreistufige Ökosystem hat derzeit keine Einnahmen und ist auf ca. angewiesen20 Millionen US-Dollar an Frühfinanzierung(Pantera, Coinbase Ventures, DCG).Insgesamt ist die Technologie führend, doch Kommerzialisierung und Ökologie stecken noch in den Kinderschuhen.Wenn Fabric erfolgreich implementiert wird, wird erwartet, dass es „Android im Zeitalter der verkörperten Intelligenz“ wird, aber es weist einen langen Zyklus, hohe Risiken und eine starke Abhängigkeit von Hardware auf.
#CodecFlow – Die Ausführungs-Engine für Robotik
CodecFlow ist ein dezentrales Ausführungsschichtprotokoll (Fabric), das auf dem Solana-Netzwerk basiert.Ziel ist es, eine bedarfsgesteuerte Betriebsumgebung für KI-Agenten und Robotersysteme bereitzustellen, die es jedem Agenten ermöglicht, über eine „Instant Machine“ zu verfügen. Der Kern des Projekts besteht aus drei Modulen:
-
Stoff: Die Cloud-übergreifende Leistungsaggregationsschicht (Weaver + Shuttle + Gauge) kann in Sekundenschnelle sichere virtuelle Maschinen, GPU-Container oder Robotersteuerungsknoten für KI-Aufgaben generieren.
-
optr SDK: Agentenausführungsframework (Python-Schnittstelle), das zum Erstellen von „Operatoren“ verwendet wird, die Desktop-, Simulations- oder echte Roboter bedienen können;
-
Token-Anreize: Die On-Chain-Anreiz- und Zahlungsschicht verbindet Computeranbieter, Agentenentwickler und Benutzer automatisierter Aufgaben, um einen dezentralen Markt für Rechenleistung und Aufgaben zu bilden.
Das Hauptziel von CodecFlow besteht darin, eine „dezentrale Ausführungsbasis für KI- und Roboterbetreiber“ zu schaffen, sodass jeder Agent in jeder Umgebung (Windows/Linux/ROS/MuJoCo/Robotercontroller) sicher ausgeführt werden kann, um alles zu erreichenRechenleistungsplanung(Stoff) →Systemumgebung(Systemschicht) →Wahrnehmung und Handeln(VLA-Operator) gemeinsame Ausführungsarchitektur.
Projektfortschritt und realistische Bewertung
Eine frühere Version wurde veröffentlichtStoffrahmen(Gehen) mitoptr SDK(Python) können Sie eine isolierte Computerinstanz in einer Webseite oder einer Befehlszeilenumgebung starten. Der Betreibermarkt wird voraussichtlich Ende 2025 eingeführt und ist als dezentrale Ausführungsschicht für KI-Rechenleistung positioniert.Zu den Hauptdienstleistungszielen zählen KI-Entwickler, Roboterforschungsteams und Unternehmen für automatisierte Betriebsabläufe.

Maschinenökonomieschicht
#BitRobot – Das offene Robotiklabor der Welt
BitRobot ist eine Software, die für verkörperte KI und Roboter entwickelt wurde.Dezentrales Netzwerk für wissenschaftliche Forschung und Zusammenarbeit(Open Robotics Lab), gemeinsam ins Leben gerufen von FrodoBots Labs und Protocol Labs. Seine Kernvision ist:Durch die offene Architektur von „Subnets + Incentive Mechanism + Verifiable Work (VRW)“Zu den Kernfunktionen gehören:
-
Definieren und überprüfen Sie den wahren Beitrag jeder Roboteraufgabe mithilfe von VRW-Standards (Verifiable Robotic Work).
-
Geben Sie Robotern in der Kette Identität und wirtschaftliche Verantwortung durch ENT (Embodied Node Token);
-
Organisieren Sie die überregionale Zusammenarbeit zwischen wissenschaftlicher Forschung, Rechenleistung, Ausrüstung und Betreibern über Subnetze.
-
Durch Senate + Gandalf AI können wir die Anreizentscheidung und wissenschaftliche Forschungssteuerung der „Mensch-Maschine-Co-Governance“ realisieren.
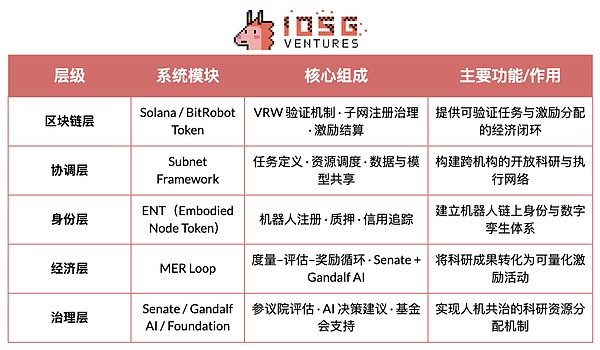
Seit der Veröffentlichung des Whitepapers im Jahr 2025 hat BitRobot mehrere Subnetze betrieben (z. B. SN/01 ET Fugi, SN/05 SeeSaw von Virtuals Protocol), um eine dezentrale Fernsteuerung und reale Datenerfassung zu erreichen, und hat einen Grand Challenges-Fonds in Höhe von 5 Millionen US-Dollar aufgelegt, um wissenschaftliche Forschungswettbewerbe in der globalen Modellentwicklung zu fördern.
#peaq – Die Ökonomie der Dinge
Peaq ist eine Layer-1-Blockchain, die speziell für die Maschinenwirtschaft entwickelt wurde und grundlegende Funktionen wie Maschinenidentität, On-Chain-Wallets, Zugriffskontrolle und Zeitsynchronisierung auf Nanosekundenebene (Universal Machine Time) für Millionen von Robotern und Geräten bereitstellt.Sein Robotics SDK ermöglicht es Entwicklern, Roboter mit minimalem Code „bereit für die Maschinenökonomie“ zu machen und so hersteller- und systemübergreifende Interoperabilität und Interaktion zu ermöglichen.
Derzeit hat Peaq die weltweit erste tokenisierte Roboterfarm auf den Markt gebracht und unterstützt mehr als 60 reale Maschinenanwendungen. Sein Tokenisierungs-Framework hilft Robotikunternehmen, Kapital für kapitalintensive Hardware zu beschaffen und das Engagement vom traditionellen B2B/B2C auf eine breitere Community-Ebene auszuweiten.Mit einem Anreizpool auf Protokollebene, der durch Netzwerkgebühren injiziert wird, kann Peaq den Zugang zu neuen Geräten subventionieren und Entwickler unterstützen und so ein wirtschaftliches Schwungrad bilden, das die beschleunigte Ausweitung von Robotik- und Physik-KI-Projekten vorantreibt.

Datenschicht
Ziel ist die Lösung des Problems knapper und teurer hochwertiger realer Daten im Embodied-Intelligence-Training.Sammeln und generieren Sie Mensch-Computer-Interaktionsdaten über mehrere Wege, einschließlich Fernsteuerung (PrismaX, BitRobot Network), First-Person-Perspektive und Bewegungserfassung (Mecka, BitRobot Network, Sapien, Vader, NRN) sowie Simulation und synthetische Daten (BitRobot Network), und stellen Sie so eine skalierbare und verallgemeinerbare Trainingsbasis für Robotermodelle bereit.
Was klar sein muss ist, Web3 ist nicht gut darin, „Daten zu produzieren“——In Bezug auf Hardware, Algorithmus und Erfassungseffizienz übertrifft der Web2-Riese jedes DePIN-Projekt bei weitem. Sein wahrer Wert liegt darinGestalten Sie den Verteilungs- und Anreizmechanismus von Daten neu.Basierend auf „Stabiles Währungszahlungsnetzwerk + Crowdsourcing-Modell“Durch ein erlaubnisloses Anreizsystem und einen On-Chain-Rechtebestätigungsmechanismus werden eine kostengünstige Abrechnung kleiner Beträge, die Rückverfolgbarkeit von Beiträgen und eine automatische Gewinnbeteiligung erreicht.Allerdings steht Open Crowdsourcing immer noch vor dem Problem eines geschlossenen Kreislaufs zwischen Qualität und Nachfrage – die Qualität der Daten ist ungleichmäßig und es mangelt an effektiver Überprüfung und stabilen Käufern.
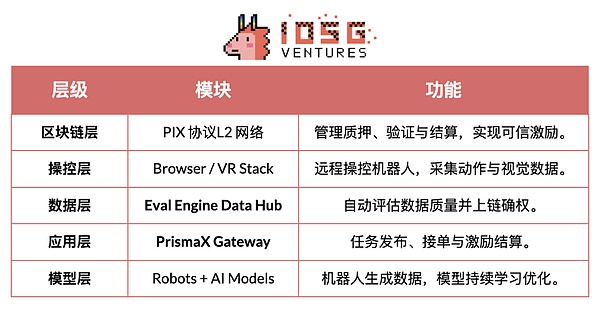
#PrismaX
PrismaX ist ein dezentrales Fernsteuerungs- und Datenwirtschaftsnetzwerk für verkörperte Intelligenz (verkörperte KI). Ziel ist es, einen „globalen Roboterarbeitsmarkt“ aufzubauen und es menschlichen Bedienern, Roboterausrüstung und KI-Modellen zu ermöglichen, sich durch das On-Chain-Anreizsystem gemeinsam zu entwickeln.Der Kern des Projekts besteht aus zwei Hauptkomponenten:
-
Teleoperationsstapel——Fernsteuerungssystem (Browser/VR-Schnittstelle + SDK), das globale Roboterarme und Serviceroboter verbindet, um eine menschliche Steuerung und Datenerfassung in Echtzeit zu erreichen;
-
Evaluierungs-Engine——Datenauswertungs- und Verifizierungs-Engine (CLIP + DINOv2 + semantisches Scoring des optischen Flusses), die Qualitätsbewertungen für jeden Betriebsverlauf generiert und diese zur Abrechnung in die Kette hochlädt.
PrismaX wandelt menschliches Bedienverhalten in maschinelle Lerndaten durch einen dezentralen Anreizmechanismus zum Aufbau eines umFernsteuerung → Datenerfassung → Modelltraining → On-Chain-AbwicklungEin vollständig geschlossener Kreislauf zur Verwirklichung einer Kreislaufwirtschaft, in der „menschliche Arbeit ein Datengut ist“.
Projektfortschritt und realistische Bewertung
PrismaX hat im August 2025 eine Beta-Version (gateway.prismax.ai) veröffentlicht. Benutzer können den Roboterarm fernsteuern, um Greifexperimente durchzuführen und Trainingsdaten zu generieren. Die Eval Engine läuft intern bereits.Insgesamt weist die PrismaX-Technologie einen hohen Umsetzungsgrad und eine klare Positionierung auf.Es ist die zentrale Zwischenschicht, die „menschlicher Betrieb × KI-Modell × Blockchain-Abwicklung“ verbindet.Es wird erwartet, dass sein langfristiges Potenzial darin besteht, ein „dezentrales Arbeits- und Datenprotokoll im Zeitalter der verkörperten Intelligenz“ zu werden, kurzfristig steht es jedoch immer noch vor Größenherausforderungen.
#BitRobot-Netzwerk
BitRobot Network realisiert über sein Subnetz die Datenerfassung aus mehreren Quellen wie Video, Fernsteuerung und Simulation.Mit SN/01 ET Fugi können Benutzer den Roboter fernsteuern, um Aufgaben zu erledigen und Navigations- und Wahrnehmungsdaten in einer Interaktion im „echten Pokémon Go-Stil“ zu sammeln.Dieses Gameplay führte zur Erstellung des FrodoBots-2K-Datensatzes, einem der größten Open-Source-Datensätze für die Mensch-Maschine-Navigation, der derzeit von Institutionen wie UC Berkeley RAIL und Google DeepMind verwendet wird.SN/05 SeeSaw (Virtual Protocol) nutzt das iPhone, um First-Person-Videodaten durch groß angelegtes Crowdsourcing in realen Umgebungen zu sammeln.Andere angekündigte Subnetze wie RoboCap und Rayvo konzentrieren sich auf die Erfassung von First-Person-Videodaten mit kostengünstigen physischen Geräten.
#Mecka
Mecka ist ein Roboterdatenunternehmen, das gamifizierte Mobiltelefonsammlungen und maßgeschneiderte Hardwaregeräte nutzt, um First-Person-Videos, menschliche Bewegungsdaten und Aufgabendemonstrationen per Crowdsourcing zu sammeln, um umfangreiche multimodale Datensätze zu erstellen und das Training verkörperter Intelligenzmodelle zu unterstützen.
#Sapien
Sapien ist eine Crowdsourcing-Plattform mit „menschlicher Bewegungsdaten-gesteuerter Roboterintelligenz“ als Kern. Es sammelt menschliche Bewegungs-, Haltungs- und Interaktionsdaten über tragbare Geräte und mobile Anwendungen, um verkörperte Intelligenzmodelle zu trainieren.Das Projekt hat sich zum Ziel gesetzt, das weltweit größte Netzwerk für menschliche Bewegungsdaten aufzubauen und natürliches menschliches Verhalten zu einer grundlegenden Datenquelle für das Lernen und die Verallgemeinerung von Robotern zu machen.
#Vader
Vader sammelt Crowdsourcing-Videos und Aufgabendemonstrationen aus der Ego-Perspektive über seine reale MMO-App EgoPlay: Benutzer zeichnen tägliche Aktivitäten aus der Ego-Perspektive auf und werden mit $VADER belohnt.Seine ORN-Datenpipeline kann Original-POV-Bilder in datenschutzverarbeitete strukturierte Datensätze umwandeln, einschließlich Aktionsbezeichnungen und semantischen Erzählungen, die direkt für das Strategietraining humanoider Roboter verwendet werden können.
#NRN-Agenten
Eine gamifizierte verkörperte RL-Datenplattform, die menschliche Demonstrationsdaten durch browserseitige Robotersteuerung und Simulationswettbewerbe sammelt.NRN generiert Long-Tail-Verhaltensverläufe durch „kompetitive“ Aufgaben, die für Nachahmungslernen und kontinuierliches Verstärkungslernen verwendet werden und als skalierbare Datenprimitive zur Unterstützung von Sim-to-Real-Richtlinientraining dienen.
#Verkörperter intelligenter Datenerfassungsschicht-Projektvergleich

Wahrnehmung und Simulation (Middleware & Simulation)
Die Wahrnehmungs- und Simulationsschicht stellt die Kerninfrastruktur für Roboter bereit, um die physische Welt und intelligente Entscheidungsfindung zu verbinden, einschließlich Positionierung, Kommunikation, räumlicher Modellierung, Simulationstraining und anderen Fähigkeiten. Es ist das „Mittelschichtskelett“ für den Aufbau groß angelegter verkörperter intelligenter Systeme.Derzeit befindet sich dieses Feld noch im frühen Explorationsstadium.Jedes Projekt hat ein differenziertes Layout in den Richtungen hochpräzise Positionierung, Shared Space Computing, Protokollstandardisierung und verteilte Simulation entwickelt. Es gibt noch keinen einheitlichen Standard oder kein interoperables Ökosystem.
Middleware &Räumliche Infrastruktur
Die Kernfähigkeiten von Robotern – Navigation, Positionierung, Konnektivität und räumliche Modellierung – bilden eine wichtige Brücke zwischen der physischen Welt und intelligenter Entscheidungsfindung. Während die umfassenderen DePIN-Projekte (Silencio, WeatherXM, DIMO) begannen, sich auf „Roboter“ zu beziehen, beziehen sich die folgenden Projekte am unmittelbarsten auf verkörperte Intelligenz.
#RoboStack – Cloud-nativer Roboterbetriebsstack
RoboStack ist eine Cloud-native Roboter-Middleware, die Echtzeitplanung, Fernsteuerung und plattformübergreifende Interoperabilität von Roboteraufgaben über RCP (Robot Context Protocol) realisiert und Cloud-Simulation, Workflow-Orchestrierung und Agentenzugriffsfunktionen bietet.
#GEODNET – Dezentrales GNSS-Netzwerk
GEODNET ist ein globales dezentrales GNSS-Netzwerk, das eine hochpräzise RTK-Positionierung im Zentimeterbereich ermöglicht. Durch verteilte Basisstationen und On-Chain-Anreize bietet es eine „geografische Referenzschicht“ in Echtzeit für Drohnen, autonomes Fahren und Roboter.
#Auki – Posemesh für Spatial Computing
Auki hat ein dezentrales Posemesh-Spatial-Computing-Netzwerk aufgebaut, das mithilfe von Crowdsourcing-Sensoren und Rechenknoten 3D-Umgebungskarten in Echtzeit generiert und so einen gemeinsamen räumlichen Maßstab für AR, Roboternavigation und Zusammenarbeit mit mehreren Geräten bietet.Es ist die Schlüsselinfrastruktur, die den virtuellen Raum und reale Szenen verbindet und die Integration von AR × Robotics fördert.
#Tashi Network – Echtzeit-Grid-Collaboration-Netzwerk für Roboter
Dezentrales Echtzeit-Grid-Netzwerk, um einen Konsens unter 30 ms, einen Sensoraustausch mit geringer Latenz und eine Synchronisierung des Status mehrerer Roboter zu erreichen. Sein MeshNet SDK unterstützt Shared SLAM, Gruppenzusammenarbeit und robuste Kartenaktualisierungen und bietet eine leistungsstarke Echtzeit-Zusammenarbeitsschicht für verkörperte KI.
#Staex – ein dezentrales Konnektivitäts- und Telemetrienetzwerk
Eine dezentrale Konnektivitätsschicht, die aus der Forschungs- und Entwicklungsabteilung der Deutschen Telekom stammt, bietet sichere Kommunikation, vertrauenswürdige Telemetrie und Gerät-zu-Cloud-Routing-Funktionen und ermöglicht es Roboterflotten, zuverlässig Daten auszutauschen und über verschiedene Betreiber hinweg zusammenzuarbeiten.
Simulations- und Trainingssystem (Distributed Simulation & Learning)
#Gradient – Auf dem Weg zu offener Intelligenz
Gradient ist ein KI-Labor, das „Open Intelligence“ aufbaut und sich der Umsetzung von verteiltem Training, Argumentation, Verifizierung und Simulation auf der Grundlage einer dezentralen Infrastruktur widmet; Sein aktueller Technologie-Stack umfasst Parallax (verteiltes Denken), Echo (verteiltes Reinforcement Learning und Multi-Agent-Training) und Gradient Cloud (KI-Lösungen für Unternehmen). Im Bereich der Robotik bietet die Mirage-Plattform verteilte Simulationen, dynamische interaktive Umgebungen und groß angelegte parallele Lernfunktionen für das Training verkörperter Intelligenz, um das Training von Weltmodellen und allgemeinen Strategien zu beschleunigen.Mirage prüft eine mögliche Zusammenarbeit mit NVIDIA bei seiner Newton-Engine.
Einkommensschicht aus Robotervermögen (RobotFi/RWAiFi)
Diese Ebene konzentriert sich auf die Schlüsselverbindung der Umwandlung von Robotern von „produktiven Werkzeugen“ in „finanzielle Vermögenswerte“ und baut die finanzielle Infrastruktur der Maschinenwirtschaft durch Tokenisierung von Vermögenswerten, Einkommensverteilung und dezentrale Governance auf.Zu den repräsentativen Projekten gehören:
#XmaquinaDAO – Physisches KI-DAO
XMAQUINA ist ein dezentrales Ökosystem, das globalen Benutzern äußerst liquide Beteiligungskanäle für führende humanoide Roboter und verkörperte Intelligenzunternehmen bietet und so Möglichkeiten in die Kette bringt, die ursprünglich nur Risikokapitalinstitutionen zur Verfügung standen.Sein Token DEUS ist sowohl ein liquider Indexwert als auch ein Governance-Träger, der zur Koordinierung der Treasury-Allokation und der ökologischen Entwicklung verwendet wird.Über das DAO-Portal und das Machine Economy Launchpad kann die Community durch die Tokenisierung von Maschinenressourcen und strukturierte On-Chain-Beteiligung gemeinsam aufkommende physische KI-Projekte durchführen und unterstützen.
#GAIB – Die Wirtschaftsschicht für KI-Infrastruktur
GAIB hat sich zum Ziel gesetzt, eine einheitliche Wirtschaftsschicht für physische KI-Infrastruktur wie GPUs und Roboter bereitzustellen, dezentrales Kapital mit realen KI-Infrastrukturressourcen zu verbinden und ein überprüfbares, zusammensetzbares und profitables intelligentes Wirtschaftssystem aufzubauen.
In Richtung Roboter „verkauft GAIB keine Roboter-Token“, sondern erreicht die Transformation von „realem Cashflow → zusammensetzbaren Einkommensvermögenswerten in der Kette“ durch die Finanzialisierung von Roboterausrüstung und Betriebsverträgen (RaaS, Datenerfassung, Fernbetrieb usw.) in der Kette.Dieses System deckt die Hardware-Finanzierung (Finanzleasing/Verpfändung), den operativen Cashflow (RaaS/Datendienst) und den Datenflussumsatz (Lizenz/Vertrag) usw. ab und macht Robotervermögenswerte und deren Cashflow messbar, bepreisbar und handelbar.
GAIB nutzt AID/sAID als Abwicklungs- und Einkommensträger, garantiert stabile Renditen durch strukturierte Risikokontrollmechanismen (Überbesicherung, Reserven und Versicherungen) und verfügt über langfristigen Zugang zu DeFi-Derivaten und Liquiditätsmärkten, wodurch ein finanzieller geschlossener Kreislauf von „Robotervermögenswerten“ zu „kombinierbaren Einkommensvermögenswerten“ entsteht.Ziel ist es, das wirtschaftliche Rückgrat der Intelligenz im KI-Zeitalter zu werden
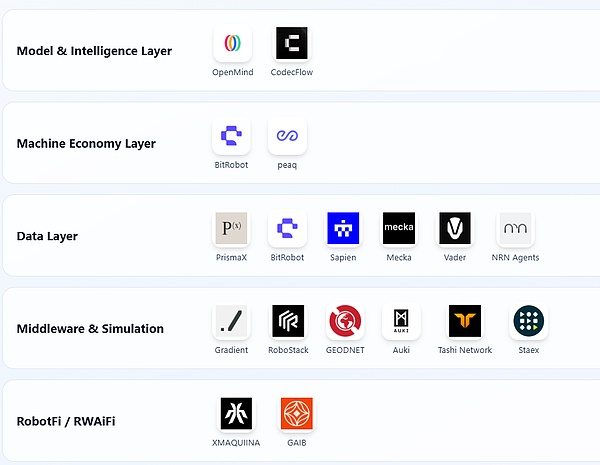
Ökologische Karte des Web3-Roboters
Zusammenfassung und Ausblick: Realistische Herausforderungen und langfristige Chancen
Aus langfristiger Sicht istRoboter × KI × Web3Die Integration zielt darauf ab, ein dezentrales maschinelles Wirtschaftssystem (DeRobot Economy) aufzubauen und verkörperte Intelligenz von der „Einzelmaschinenautomatisierung“ bis zur vernetzten Zusammenarbeit mit „bestätigbaren Rechten, abrechnungsfähig und Governance“ zu fördern. Seine Kernlogik ist durch „TToken → Bereitstellung → Daten → Wertumverteilung„Es wird ein selbstzirkulierender Mechanismus geschaffen, der es Robotern, Sensoren und Rechenleistungsknoten ermöglicht, Rechte zu bestätigen, zu handeln und Gewinne zu teilen.“
Aus praktischer Sicht befindet sich dieses Modell jedoch noch im frühen Forschungsstadium und ist noch weit davon entfernt, einen stabilen Cashflow und einen groß angelegten kommerziellen geschlossenen Kreislauf zu bilden.Die meisten Projekte bleiben auf der narrativen Ebene und werden nur begrenzt tatsächlich umgesetzt.Die Herstellung sowie der Betrieb und die Wartung von Robotern sind kapitalintensive Branchen, und Token-Anreize allein können den Ausbau der Infrastruktur nicht unterstützen.Obwohl das On-Chain-Finanzdesign zusammensetzbar ist, hat es das Problem der Risikopreisgestaltung und Renditerealisierung realer Vermögenswerte noch nicht gelöst. Daher ist die sogenannte „Maschinennetzwerk-Selbstzirkulation“ immer noch ideal und ihr Geschäftsmodell muss in der Realität überprüft werden.
-
Modellintelligenzschicht(Model & Intelligence Layer) ist derzeit die Richtung mit dem größten langfristigen Wert.Open-Source-Roboterbetriebssysteme, die von OpenMind repräsentiert werden, versuchen, das geschlossene Ökosystem zu durchbrechen und die Zusammenarbeit mehrerer Roboter und die Sprache-zu-Aktion-Schnittstellen zu vereinheitlichen.Die technische Vision ist klar und das System ist vollständig, aber das Projektvolumen ist riesig und der Verifizierungszyklus lang, und es hat sich noch kein positives Feedback auf industrieller Ebene gebildet.
-
Maschinenwirtschaftsschicht(Machine Economy Layer) befindet sich noch im Vorstadium. In Wirklichkeit ist die Anzahl der Roboter begrenzt und es ist für das DID-Identitäts- und Anreiznetzwerk schwierig, einen in sich konsistenten Zyklus zu bilden.Von einer „Maschinenarbeitsökonomie“ sind wir noch weit entfernt.In Zukunft werden die wirtschaftlichen Auswirkungen von On-Chain-Identitäts-, Siedlungs- und Kollaborationsnetzwerken nur dann wirklich zum Tragen kommen, wenn verkörperte Intelligenz in großem Umfang eingesetzt wird.
-
Datenerfassungsschicht(Datenschicht) Die Datenerfassungsschicht hat den niedrigsten Schwellenwert, kommt aber derzeit der kommerziellen Machbarkeit am nächsten.Die verkörperte intelligente Datenerfassung erfordert eine extrem hohe raumzeitliche Kontinuität und aktionssemantische Genauigkeit, die ihre Qualität und Wiederverwendbarkeit bestimmt.Die Balance zwischen „Crowdsourcing-Größe“ und „Datenzuverlässigkeit“ zu finden, ist eine zentrale Herausforderung in der Branche.PrismaX zielt zunächst auf die Anforderungen der B-Seite ab und verteilt dann die Aufgabenerfassung und -überprüfung, um bis zu einem gewissen Grad replizierbare Vorlagen bereitzustellen. Der ökologische Maßstab und die Datentransaktionen benötigen jedoch noch Zeit, um sich anzusammeln.
-
Wahrnehmungs- und Simulationsschicht(Middleware & Simulation Layer) Es befindet sich noch in der technischen Verifizierungsphase und es fehlen einheitliche Standards und Schnittstellen, um ein interoperables Ökosystem zu bilden.Simulationsergebnisse lassen sich nur schwer standardisieren und auf die reale Umgebung übertragen, und die Effizienz von Sim2Real ist begrenzt.
-
Vermögenseinkommensschicht(RobotFi / RWAiFi) Web3 spielt hauptsächlich eine unterstützende Rolle bei der Finanzierung der Lieferkette, beim Leasing von Ausrüstung und bei der Investitionssteuerung und verbessert die Transparenz und Abwicklungseffizienz, anstatt die industrielle Logik neu zu gestalten.
Natürlich glauben wir, dass die Schnittstelle zwischen Robotern × KI × Web3 immer noch den Ursprung der nächsten Generation intelligenter Wirtschaftssysteme darstellt.Es ist nicht nur eine Verschmelzung technischer Paradigmen, sondern auch eine Chance zur Rekonstruktion von Produktionsbeziehungen: Wenn Maschinen Identitäten, Anreize und Governance-Mechanismen haben, wird sich die Zusammenarbeit zwischen Mensch und Maschine von der Teilautomatisierung zur vernetzten Autonomie entwickeln.Kurzfristig wird diese Richtung immer noch von Erzählungen und Experimenten dominiert, aber der institutionelle und Anreizrahmen, den sie geschaffen hat, legt den Grundstein für die Wirtschaftsordnung der zukünftigen Maschinengesellschaft.Langfristig gesehen wird die Kombination aus verkörperter Intelligenz und Web3 die Grenzen der Wertschöpfung neu gestalten und intelligente Agenten zu wirklich identifizierbaren, kollaborativen und profitablen Wirtschaftseinheiten machen.